flowchart LR
C1["Chapter 1Build the(image, label) dataset"]:::current
C2["Chapter 2 (optional)Train a model on the dataset"]
C3["Chapter 3Use a trained modelto predict new masks"]
C4["Chapter 4Compute regionalland-cover statistics"]
C1 --> C2 --> C3 --> C4
classDef current fill:#fde68a,stroke:#b45309,stroke-width:2px;
Data acquisition
NoteWhere this chapter fits
Training a segmentation model needs a dataset of (image, label) pairs — satellite tiles on one side, land-cover maps on the other. This chapter builds that dataset. By the end, you’ll know how to pull a Sentinel-2 tile for any European city, fetch its matching CLC + label (Corinne Land Cover), and confirm the two are perfectly aligned pixel-for-pixel.
You don’t need any machine learning knowledge to complete this chapter — it’s all about reading satellite rasters, handling geographic coordinates, and pairing images with their labels.
NoteWhat you will learn in this chapter
- Manipulating satellite imagery — load multispectral Sentinel-2 rasters with
rasterio, display RGB and false-colour composites, compute vegetation indices (NDVI) - Working with geographic data — use coordinate reference systems (CRS), build geometries with
shapely, perform spatial joins and interactive mapping withGeoPandasandFolium - Building a training dataset — pair Sentinel-2 images with CLC+ Backbone land-cover labels to create the input/target pairs needed to train a segmentation model
- (Optional) Acquiring new data from APIs — query the Copernicus Data Space Ecosystem via Sentinel Hub and OData APIs
1 Sentinel-2 — Understanding and Visualizing Satellite Imagery
This section introduces Sentinel-2 satellite imagery and teaches you how to load, explore, and display multispectral raster data in Python. We start with a single local file — no cloud storage or URL patterns yet — so you can focus entirely on understanding how satellite images work.
1.1 What is Sentinel-2?
Sentinel-2 is an Earth observation mission from the European Space Agency (ESA), part of the Copernicus programme. It consists of two twin satellites — Sentinel-2A and Sentinel-2B — placed in the same sun-synchronous orbit but phased 180 degrees apart, giving a 5-day revisit time at the equator.
Key characteristics:
- 13 spectral bands spanning visible, near-infrared (NIR) and short-wave infrared (SWIR)
- Spatial resolution of 10 m, 20 m or 60 m depending on the band
- 290 km swath width
- Free and open data policy
These properties make Sentinel-2 a reference dataset for land-cover mapping, agricultural monitoring, forestry, urban change detection and many other applications.
Why multiple bands matter. A regular camera captures three channels (Red, Green, Blue). Sentinel-2 captures 13 channels at different wavelengths — from visible light to short-wave infrared. Each band reveals different properties of the surface: vegetation health, water content, bare soil, etc. By combining bands in different ways, we can extract information that is invisible to the naked eye.
Tip
Learn more: Sentinel-2 Mission information (see in particular the Sentinel-2 Spectral Response Functions (S2-SRF) document for the spectral bands) · Sentinel Hub custom scripts gallery
1.1.1 Spectral bands
A spectral band is a narrow window of wavelengths that the sensor records separately. Sentinel-2’s MultiSpectral Instrument (MSI) captures 13 bands spanning visible, near-infrared (NIR) and short-wave infrared (SWIR) light — from 443 nm to 2190 nm. Each band is tuned to a specific physical property of the surface or atmosphere, and the table below groups them by native spatial resolution, which reflects a hardware trade-off made by ESA:
- 10 m — the “core” mapping bands.
B2(blue),B3(green),B4(red) andB8(NIR). These are the bands you’ll use most often to look at the landscape: true-colour RGB composites, NDVI, and any high-detail analysis of vegetation, water or built-up areas. - 20 m — vegetation structure and moisture. The three red-edge bands (
B5,B6,B7) trace the steep transition between red and NIR that is characteristic of healthy chlorophyll.B8Ais a narrower NIR window, andB11/B12(SWIR) are sensitive to water content in leaves and soil, as well as snow/cloud discrimination. - 60 m — atmospheric correction.
B1(coastal aerosol),B9(water vapour) andB10(cirrus). These bands exist primarily to clean up the other bands, not to describe the ground, so a coarser pixel is sufficient.
Note
L1C vs L2A — two processing levels. Copernicus distributes Sentinel-2 data at two processing levels. Level-1C contains top-of-atmosphere reflectance for all 13 bands. Level-2A applies atmospheric correction and delivers surface reflectance, which is what we want for land-cover mapping. L2A drops B10 (the cirrus band — only useful for cloud detection, not for the surface) and delivers 12 spectral bands. The training dataset in this tutorial is built from L2A products: the pre-processed GeoTIFFs stack these 12 spectral bands and append two derived vegetation/water indices, NDVI and NDWI, for a total of 14 channels.
A GeoTIFF is a standard TIFF image file with extra embedded metadata describing where the image sits on Earth — coordinate reference system (CRS), pixel size, and an affine transform that maps each (row, column) to a geographic (x, y) coordinate. In other words: a regular image plus the spatial information needed to overlay it correctly on a map. The format also supports multiple bands in a single file, which is why we can pack the 14 channels into one .tif
NDVI (Normalised Difference Vegetation Index) and NDWI (Normalised Difference Water Index) are computed once at preprocessing time so the model can use them as input features without having to re-derive them from the spectral bands at every batch.
src/download_region.py follows the same convention and produces 14-channel float64 GeoTIFFs identical in layout to those on projet-funathon.
| Band | Central wavelength (nm) |
Resolution (m) | Description | Use / Application |
|---|---|---|---|---|
| B1 | 443 | 60 | Coastal aerosol | Detects aerosols and haze; used for atmospheric correction over coastal waters. |
| B2 | 490 | 10 | Blue | Visible blue channel; useful for bathymetry and distinguishing soil from vegetation. |
| B3 | 560 | 10 | Green | Peak vegetation reflectance; also used for water body delineation. |
| B4 | 665 | 10 | Red | Chlorophyll absorption; key band for computing NDVI and monitoring vegetation health. |
| B5 | 705 | 20 | Vegetation red edge | Sensitive transition zone between red and NIR; indicates chlorophyll content and vegetation stress. |
| B6 | 740 | 20 | Vegetation red edge | Refines canopy chlorophyll estimation and leaf area index mapping. |
| B7 | 783 | 20 | Vegetation red edge | Captures the full red-edge slope for detailed vegetation structure analysis. |
| B8 | 842 | 10 | NIR | Strongly reflected by healthy vegetation; the primary NIR band used in NDVI. |
| B8A | 865 | 20 | Narrow NIR | Narrower NIR window for more precise vegetation and land-surface reflectance studies. |
| B9 | 945 | 60 | Water vapour | Measures atmospheric water vapour column; used for atmospheric correction. |
| B10 | 1375 | 60 | SWIR – Cirrus | Detects thin cirrus clouds; used for cloud masking before analysis. |
| B11 | 1610 | 20 | SWIR | Sensitive to vegetation water content and soil moisture; discriminates snow from clouds. |
| B12 | 2190 | 20 | SWIR | Detects dry/senescent vegetation, differentiates geological materials, and maps burn severity. |
1.2 What is rasterio?
rasterio is a Python library built on top of GDAL for reading and writing geospatial raster data (GeoTIFF, etc.). It is the standard tool for working with satellite imagery in Python.
Note
Think of a raster as a spreadsheet with coordinates. A regular spreadsheet has rows and columns filled with numbers. A raster is the same idea, except each cell is a pixel located at a specific place on Earth, and you can stack multiple layers (bands) on top of each other — one layer per spectral band.
Key concepts:
- Raster = a grid of pixels organised into bands (layers). Each band represents one channel of data (e.g. a spectral band from a satellite sensor).
rasterio.open(path)returns aDatasetReader— works with local files and HTTPS URLs alike.src.read(bands)returns a NumPy array with shape(bands, H, W)— this is the CHW (Channel, Height, Width) convention, used by rasterio, PyTorch, and most deep learning frameworks. For display withmatplotlib(or PIL), you need to transpose to(H, W, C)— the HWC (Height, Width, Channel) convention — usingnp.transpose(array, (1, 2, 0)). Expect to move between the two conventions constantly: CHW when feeding arrays to a model, HWC when plotting them.src.crs— the coordinate reference system attached to the raster.src.bounds— the geographic extent as(left, bottom, right, top).src.profile/src.meta— full metadata dictionary (driver, dtype, nodata value, affine transform, etc.).
Why band indexing matters: Sentinel-2 has 13 spectral bands, reading specific band combinations reveals different features:
src.read([4, 3, 2])→ true-colour RGB (Red, Green, Blue)src.read([8, 4, 3])→ false-colour composite (NIR, Red, Green) — vegetation appears bright redsrc.read([8, 4])→ bands needed for NDVI (Normalised Difference Vegetation Index)
You will practise these combinations in the exercises below.
Warning
Watch out: rasterio band index ≠ Sentinel-2 band number. In the pre-processed GeoTIFFs the channel layout is:
| Rasterio index | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Content | B1 | B2 | B3 | B4 | B5 | B6 | B7 | B8 | B8A | B9 | B11 | B12 | NDVI | NDWI |
Two things to remember:
B8Asits at index 9, before B9. Sosrc.read(9)returns narrow NIR (B8A), not B9. It is only a coincidence thatsrc.read(2)throughsrc.read(8)line up with B2–B8.- There is no B10 in the file. L2A processing removes it (cirrus band, no surface information), so index 11 jumps straight to B11. Indices 13 and 14 are NDVI and NDWI, computed once during preprocessing.
Check this table before adapting code for SWIR (B11, B12) or the derived indices to avoid off-by-one bugs.
Tip
Learn more: rasterio documentation
1.3 Loading a Sentinel-2 tile
For this tutorial, we work with pre-processed Sentinel-2 patches that are publicly available on sspcloud object storage. To keep things simple at this stage, we download a single sample tile of a completely random location and work with it directly.
import os
import urllib.request
import rasterio
import numpy as np
tile_url = (
"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
"project3/data/images/LU000/"
"2024/4042000_2951690_0_637.tif"
)
with rasterio.open(tile_url) as src:
tile_crs = src.crs
tile_bounds = src.bounds
tile_count = src.count
tile_height = src.height
tile_width = src.width
# Read RGB bands: B4 (Red), B3 (Green), B2 (Blue)
rgb_data = src.read([4, 3, 2])
print(f"CRS: {tile_crs}")
print(f"Bounds: {tile_bounds}")
print(f"Shape: {tile_count} bands x {tile_height} x {tile_width} px")CRS: EPSG:3035
Bounds: BoundingBox(left=4042000.0, bottom=2951690.0, right=4044500.0, top=2954190.0)
Shape: 14 bands x 250 x 250 px
Note
The pre-processed GeoTIFF files used here contain 14 channels: the 12 L2A spectral bands (B01–B12 with B10 dropped, plus B8A) in bands 1–12, then NDVI as band 13 and NDWI as band 14. NDVI and NDWI are derived vegetation/water indices — they’re not spectral bands but cheap, useful features the model receives directly.
Now let’s display the tile as an RGB composite (true-colour: Red, Green, Blue).
A quick word on display normalization. Raw Sentinel-2 L2A surface reflectance is stored as 16-bit integers on a 0–10 000 scale. matplotlib expects RGB values in [0, 1], so passing the raw array directly produces an almost-black image. We fix this with a standard percent-clip contrast stretch: divide every pixel by the 98th percentile of the image (so ~98 % of pixels fall into [0, 1]) and then clamp the top 2 % to 1. This is the same idea as the “percent clip” stretch in QGIS or ArcGIS — it’s robust to the handful of extremely bright outliers (clouds, specular reflections, sensor artefacts) that would otherwise compress the rest of the image into a dark band.
#
import matplotlib.pyplot as plt
# Transpose to (H, W, 3) and normalize for display
rgb = np.transpose(rgb_data, (1, 2, 0)).astype(np.float32)
p98 = np.percentile(rgb, 98)
rgb = np.clip(rgb / p98, 0, 1)
fig, ax = plt.subplots(figsize=(5, 5))
ax.imshow(rgb)
ax.set_title("Sentinel-2 RGB composite (B4, B3, B2) — LU000")
ax.axis("off")
plt.tight_layout()
plt.show()
NoteLine-by-line breakdown (and what happens without normalization)
np.transpose(rgb_data, (1, 2, 0))— rearranges from rasterio’s(bands, height, width)to matplotlib’s expected(height, width, bands).np.percentile(rgb, 98)— the 98th percentile of all pixel values, used instead of the true maximum so that a few bright outliers don’t dominate the scale.np.clip(rgb / p98, 0, 1)— rescales so ~98 % of pixels fall into[0, 1]and clamps the top 2 % to white.
Without those three lines, the raw 16-bit data displays like this:
import matplotlib.pyplot as plt
# Transpose to (H, W, 3) and normalize for display
rgb = np.transpose(rgb_data, (1, 2, 0)).astype(np.float32)
fig, ax = plt.subplots(figsize=(5, 5))
ax.imshow(rgb)
ax.set_title("Sentinel-2 RGB composite (B4, B3, B2) — LU000 (no normalization)")
ax.axis("off")
plt.tight_layout()
plt.show()
CautionExercise 1 — Read a Sentinel-2 tile and display it
Goal: Open the remote sample Sentinel-2 patch, extract the RGB bands, normalize the image, and display it.
Steps:
- Open the tile with
rasterio.open(tile_url)and read bands 4, 3, 2 (Red, Green, Blue) - Store the CRS and bounds from the rasterio source
- Transpose the array to
(H, W, 3)and normalize for display (divide by the 98th percentile, clip to[0, 1]) - Display the RGB composite with
matplotlib
TipHint — Exercise 1
- Inside the
with rasterio.open(tile_url) as src:block, usesrc.read([4, 3, 2])to get a(3, H, W)array. src.crsandsrc.boundsgive you the CRS and bounding box.- Transpose with
np.transpose(rgb_data, (1, 2, 0)), cast tofloat32, then normalize: divide bynp.percentile(rgb, 98)and clip to[0, 1]withnp.clip.
Code template:
import rasterio
import numpy as np
import matplotlib.pyplot as plt
tile_url = (
"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
"project3/data/images/LU000/"
"2024/4042000_2951690_0_637.tif"
)
# Step 1: Open the tile and read RGB bands (4, 3, 2)
with rasterio.open(tile_url) as src:
rgb_data = ___ # TODO: read bands 4, 3, 2
tile_crs = ___ # TODO
tile_bounds = ___ # TODO
# Step 2: Transpose to (H, W, 3) and normalize
rgb = ___ # TODO: np.transpose, then normalize with 98th percentile and clip
# Step 3: Display
fig, ax = plt.subplots(figsize=(5, 5))
___ # TODO: ax.imshow(...)
ax.set_title("Sentinel-2 RGB composite")
ax.axis("off")
plt.tight_layout()
plt.show()
TipSolution — Exercise 1
import rasterio
import numpy as np
import matplotlib.pyplot as plt
tile_url = (
"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
"project3/data/images/LU000/"
"2024/4042000_2951690_0_637.tif"
)
with rasterio.open(tile_url) as src:
rgb_data = src.read([4, 3, 2])
tile_crs = src.crs
tile_bounds = src.bounds
rgb = np.transpose(rgb_data, (1, 2, 0)).astype(np.float32)
p98 = np.percentile(rgb, 98)
rgb = np.clip(rgb / p98, 0, 1)
fig, ax = plt.subplots(figsize=(5, 5))
ax.imshow(rgb)
ax.set_title("Sentinel-2 RGB composite")
ax.axis("off")
plt.tight_layout()
plt.show()
1.4 What are band composites?
A band composite is an image formed by mapping three spectral bands to the Red, Green, and Blue channels of a display. By choosing different bands, you highlight different surface properties:
- True-colour (B4, B3, B2) — what the human eye would see. Useful for general orientation.
- False-colour (B8, B4, B3) — near-infrared mapped to red. Healthy vegetation appears bright red because it strongly reflects NIR light. Useful for spotting vegetation stress, urban areas, and water bodies.
- NDVI (Normalised Difference Vegetation Index) — not a composite, but a single-band index computed from NIR and Red: \(\text{NDVI} = \frac{B8 - B4}{B8 + B4}\). Values near +1 indicate dense vegetation; near 0 indicate bare soil; negative values indicate water.

Tip
Learn more: Wikipedia — NDVI · Sentinel Hub custom scripts gallery
CautionExercise 2 — Explore raster metadata and create a false-colour composite
Goal: Inspect the raster metadata of a Sentinel-2 tile using src.profile, then create a false-colour composite using bands 8 (NIR), 4 (Red), 3 (Green).
Steps:
- Open the tile with
rasterio.open(tile_url)and printsrc.profile - Read bands
[8, 4, 3](NIR, Red, Green) - Normalize the false-colour image (same method as Exercise 1: 98th percentile + clip)
- Display the true-colour RGB (from Exercise 1) and false-colour composite side by side
TipHint — Exercise 2
src.profileis a dictionary — justprint(src.profile)to see driver, dtype, crs, transform, etc.src.read([8, 4, 3])reads NIR, Red, Green in that order → shape(3, H, W).- Normalize exactly as in Exercise 1: transpose to
(H, W, 3), divide bynp.percentile(fc, 98), clip to[0, 1].
Code template:
import rasterio
import numpy as np
import matplotlib.pyplot as plt
tile_url = (
"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
"project3/data/images/LU000/"
"2024/4042000_2951690_0_637.tif"
)
# Step 2a: Open the tile and print the raster profile
with rasterio.open(tile_url) as src:
print(___) # TODO: print src.profile
# Step 2b: Read false-colour bands (NIR=8, Red=4, Green=3)
fc_data = ___ # TODO: src.read([8, 4, 3])
# Step 2c: Normalize for display
fc = np.transpose(fc_data, (1, 2, 0)).astype(np.float32)
p98 = ___ # TODO: np.percentile(fc, 98)
fc = ___ # TODO: np.clip(fc / p98, 0, 1)
# Step 2d: Display side by side with the true-colour RGB
fig, axes = plt.subplots(1, 2, figsize=(10, 5))
axes[0].imshow(rgb)
axes[0].set_title("True colour (B4, B3, B2)")
axes[0].axis("off")
___ # TODO: axes[1].imshow(fc)
axes[1].set_title("False colour (B8, B4, B3)")
axes[1].axis("off")
plt.tight_layout()
plt.show()
TipSolution — Exercise 2
import rasterio
import numpy as np
import matplotlib.pyplot as plt
tile_url = (
"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
"project3/data/images/LU000/"
"2024/4042000_2951690_0_637.tif"
)
with rasterio.open(tile_url) as src:
print(src.profile)
fc_data = src.read([8, 4, 3])
fc = np.transpose(fc_data, (1, 2, 0)).astype(np.float32)
p98 = np.percentile(fc, 98)
fc = np.clip(fc / p98, 0, 1)
fig, axes = plt.subplots(1, 2, figsize=(10, 5))
axes[0].imshow(rgb)
axes[0].set_title("True colour (B4, B3, B2)")
axes[0].axis("off")
axes[1].imshow(fc)
axes[1].set_title("False colour (B8, B4, B3)")
axes[1].axis("off")
plt.tight_layout()
plt.show(){'driver': 'GTiff', 'dtype': 'float64', 'nodata': None, 'width': 250, 'height': 250, 'count': 14, 'crs': CRS.from_wkt('PROJCS["ETRS89-extended / LAEA Europe",GEOGCS["ETRS89",DATUM["European_Terrestrial_Reference_System_1989",SPHEROID["GRS 1980",6378137,298.257222101,AUTHORITY["EPSG","7019"]],AUTHORITY["EPSG","6258"]],PRIMEM["Greenwich",0,AUTHORITY["EPSG","8901"]],UNIT["degree",0.0174532925199433,AUTHORITY["EPSG","9122"]],AUTHORITY["EPSG","4258"]],PROJECTION["Lambert_Azimuthal_Equal_Area"],PARAMETER["latitude_of_center",52],PARAMETER["longitude_of_center",10],PARAMETER["false_easting",4321000],PARAMETER["false_northing",3210000],UNIT["metre",1,AUTHORITY["EPSG","9001"]],AXIS["Northing",NORTH],AXIS["Easting",EAST],AUTHORITY["EPSG","3035"]]'), 'transform': Affine(10.0, 0.0, 4042000.0,
0.0, -10.0, 2954190.0), 'blockxsize': 250, 'blockysize': 1, 'tiled': False, 'interleave': 'pixel'}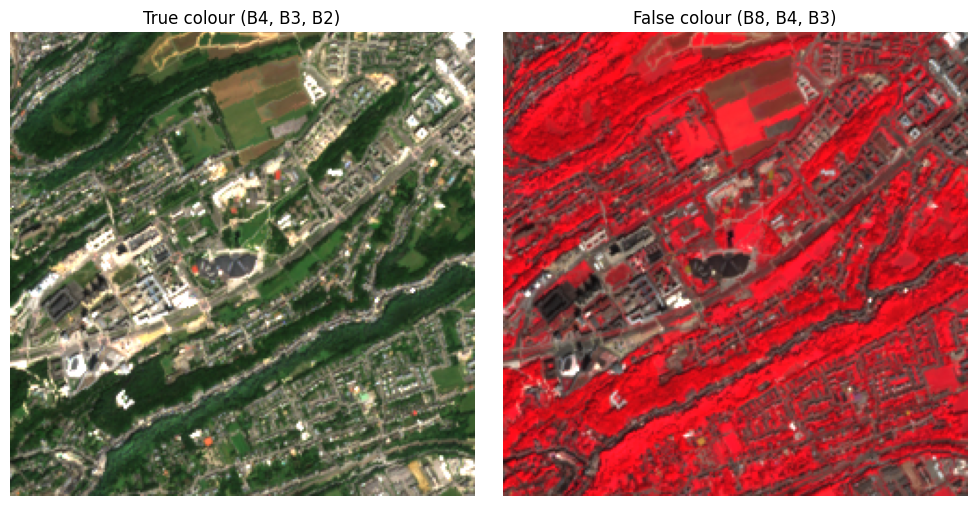
CautionExercise 3 — Compute and display NDVI
Goal: Compute the Normalised Difference Vegetation Index (NDVI) from a Sentinel-2 tile and display it as a colour-coded map.
NDVI is defined as:
\[ \text{NDVI} = \frac{\text{NIR} - \text{Red}}{\text{NIR} + \text{Red}} \]
NDVI values range from −1 to +1:
- Near +1 → dense, healthy vegetation
- Near 0 → bare soil, urban areas
- Negative → water bodies
Steps:
- Read bands 8 (NIR) and 4 (Red) as
float32 - Compute NDVI pixel-wise, handling division by zero
- Display with
imshow(cmap="RdYlGn", vmin=-1, vmax=1)and a colorbar
TipHint — Exercise 3
src.read(8)reads a single band → shape(H, W). Cast tofloat32for division.- Use
np.where(nir + red == 0, 0, (nir - red) / (nir + red))to avoid division by zero. cmap="RdYlGn"gives a red-yellow-green colour scale: red for low NDVI, green for high.fig.colorbar(im, ax=ax, shrink=0.8, label="NDVI")adds a colour legend.
Code template:
import rasterio
import numpy as np
import matplotlib.pyplot as plt
tile_url = (
"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
"project3/data/images/LU000/"
"2024/4042000_2951690_0_637.tif"
)
# Step 3a: Read NIR (band 8) and Red (band 4) as float32
with rasterio.open(tile_url) as src:
nir = ___ # TODO: src.read(8).astype(np.float32)
red = ___ # TODO: src.read(4).astype(np.float32)
# Step 3b: Compute NDVI (handle division by zero)
ndvi = ___ # TODO: np.where(nir + red == 0, 0, (nir - red) / (nir + red))
# Step 3c: Display
fig, ax = plt.subplots(figsize=(6, 5))
im = ___ # TODO: ax.imshow(ndvi, cmap="RdYlGn", vmin=-1, vmax=1)
ax.set_title("NDVI — LU000 (2024)")
ax.axis("off")
___ # TODO: fig.colorbar(im, ax=ax, shrink=0.8, label="NDVI")
plt.tight_layout()
plt.show()
TipSolution — Exercise 3
import rasterio
import numpy as np
import matplotlib.pyplot as plt
tile_url = (
"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
"project3/data/images/LU000/"
"2024/4042000_2951690_0_637.tif"
)
with rasterio.open(tile_url) as src:
# Healthy vegetation strongly reflects near-infrared (B8) and absorbs red (B4),
# so the ratio (NIR − Red) / (NIR + Red) gives a clean vegetation signal.
nir = src.read(8).astype(np.float32)
red = src.read(4).astype(np.float32)
# np.where guards against pixels where NIR + Red is exactly 0 (water bodies,
# nodata, deep shadow): the ratio would otherwise produce NaN and contaminate the
# colormap. Substituting 0 keeps those pixels neutral on the red-yellow-green scale.
ndvi = np.where(nir + red == 0, 0, (nir - red) / (nir + red))
fig, ax = plt.subplots(figsize=(6, 5))
# vmin=-1, vmax=1 anchors the colormap to NDVI's full theoretical range, so the
# same colour means the same vegetation cover across tiles.
im = ax.imshow(ndvi, cmap="RdYlGn", vmin=-1, vmax=1)
ax.set_title("NDVI — LU000 (2024)")
ax.axis("off")
fig.colorbar(im, ax=ax, shrink=0.8, label="NDVI")
plt.tight_layout()
plt.show()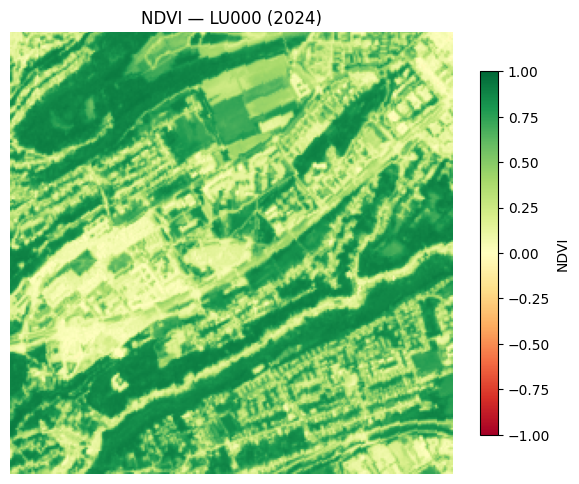
2 NUTS Regions and Finding Satellite Tiles
Now that you know how to read and display a single satellite image, the next question is: how do you find the right image for a given location? The pre-processed tiles in this project are organized by NUTS region. This section explains what NUTS regions are, how tile URLs are structured, and how to go from a city name to the correct tile.
2.1 What are NUTS regions?
NUTS (Nomenclature of Territorial Units for Statistics) is a hierarchical classification of administrative regions used by Eurostat for statistical purposes across Europe. The hierarchy has four levels:
| Level | Granularity | Example (France / Paris) | Example name |
|---|---|---|---|
| NUTS 0 | Country | FR |
France |
| NUTS 1 | Major region | FR1 |
Île-de-France |
| NUTS 2 | Region | FR10 |
Île-de-France |
| NUTS 3 | Province / department | FR101 |
Paris |
In this project, data is organized at the NUTS 3 level — each satellite tile belongs to a specific NUTS3 region. The NUTS3 code appears in the file path and URL.
NUTS boundaries are published as open data by GISCO (Eurostat’s geographic information system) in GeoJSON and other formats.
Tip
Learn more: Eurostat NUTS overview · GISCO distribution API
2.2 How data is organized on S3
Pre-processed Sentinel-2 patches are publicly available on the SSP Cloud object storage. You can access them over HTTPS (no authentication required) or via S3 (with credentials).
The HTTPS URL follows this pattern:
https://minio.lab.sspcloud.fr/projet-funathon/2026/project3/data/images/{NUTS}/{year}/{patch_id}.tifThe equivalent S3 path is:
s3://projet-funathon/2026/project3/data/images/{NUTS}/{year}/{patch_id}.tifEach pre-processed patch is a GeoTIFF covering a 250 x 250 pixel area (2 500 m at 10 m resolution). That size is a practical compromise: large enough to give the segmentation model meaningful spatial context (parcel boundaries, roads, forest edges, river meanders), small enough to fit many patches per GPU batch during training, and small enough that a whole NUTS3 region can be tiled into a few hundred patches rather than a few million. The URL path encodes the key metadata:
...images/{NUTS}/{year}/{xmin}_{ymin}_{idx}_{id}.tif| Field | Example value | Meaning |
|---|---|---|
| NUTS | LU000 |
NUTS-3 region (Luxembourg) |
| year | 2024 |
Acquisition year |
| xmin, ymin | 4042000,2951690 |
Lower-left corner in EPSG:3035 (metres) |
Each {NUTS}/{year}/ directory also contains a filename2bbox.parquet index file that maps every tile filename to its bounding box:
.../images/{NUTS}/{year}/filename2bbox.parquetThis file has two columns: filename (the .tif name) and bbox (a list of four floats [xmin, ymin, xmax, ymax] in EPSG:3035). It lets you find which tile covers a specific location without listing the full directory.
NoteHTTPS vs S3 access
The HTTPS URLs work from anywhere without credentials — great for reading individual tiles with rasterio. The S3 paths require SSP Cloud credentials (AWS_S3_ENDPOINT, AWS_ACCESS_KEY_ID, AWS_SECRET_ACCESS_KEY) but support directory listing and bulk operations via s3fs.
Important
Available regions. Not all NUTS3 regions have pre-processed tiles. The following 27 regions are covered:
| NUTS3 Code | Country | Years available |
|---|---|---|
| AT332 | Austria | 2018, 2021, 2024 |
| BE100 | Belgium | 2018, 2021, 2024 |
| BE251 | Belgium | 2018, 2021, 2024 |
| BG322 | Bulgaria | 2018, 2021, 2024 |
| CY000 | Cyprus | 2021, 2024 |
| CZ072 | Czechia | 2021, 2024 |
| DEA54 | Germany | 2018, 2021, 2024 |
| DK041 | Denmark | 2018, 2024 |
| EE00A | Estonia | 2018, 2021, 2024 |
| EL521 | Greece | 2018, 2021, 2024 |
| ES612 | Spain | 2018, 2021, 2024 |
| FI1C1 | Finland | 2018, 2021, 2024 |
| FRJ27 | France | 2018, 2021, 2024 |
| FRK26 | France | 2018, 2021, 2024 |
| HR050 | Croatia | 2018, 2021, 2024 |
| IE061 | Ireland | 2018, 2021 |
| ITI32 | Italy | 2018, 2021, 2024 |
| LT028 | Lithuania | 2018, 2021, 2024 |
| LU000 | Luxembourg | 2018, 2021, 2024 |
| LV008 | Latvia | 2018, 2021, 2024 |
| MT001 | Malta | 2018, 2021, 2024 |
| NL33C | Netherlands | 2018, 2021, 2024 |
| PL414 | Poland | 2018, 2021, 2024 |
| PT16I | Portugal | 2018, 2021, 2024 |
| RO123 | Romania | 2018, 2021, 2024 |
| SE311 | Sweden | 2018, 2021, 2024 |
| SI035 | Slovenia | 2018, 2021, 2024 |
| SK022 | Slovakia | 2018, 2021, 2024 |
| UKJ22 | United Kingdom | 2018, 2021, 2024 |
| UKRAINE | Ukraine | 2018, 2021, 2024 |
Note
Scale of the dataset and class imbalance. Across the 27 pre-processed NUTS3 regions and the available years (2021 and 2024), the dataset contains roughly 15 000–20 000 (image, label) patches — a comfortable size for training a segmentation model on a single GPU. Because these regions are built around European capital cities, the 10 CLC+ classes are not evenly represented: sealed surfaces, permanent herbaceous and periodically herbaceous dominate, while lichens and mosses or broadleaved evergreen trees are rare or completely absent in most tiles. This class imbalance is a first-order concern when training a segmentation model — naive training will optimise for the common classes and ignore the rare ones.
2.3 Finding a NUTS3 region from a city name
Given a city name, you can geocode it (convert the name to geographic coordinates) and then use a spatial join to find which NUTS3 region it belongs to. The Nominatim API (based on OpenStreetMap data) provides free geocoding.
Here is the complete workflow:
flowchart LR
A["City name"] --> B["Nominatim API<br>→ (lon, lat) WGS84"]
B --> C["Reproject<br>EPSG:3035"]
C --> D["Spatial join<br>with NUTS3"]
D --> E["NUTS code"]
E --> F["<pre>filename2bbox.parquet</pre>"]
F --> G["Tile URL"]
Here is a complete example for the Eurostat headquarters in Luxembourg:
import requests
import geopandas as gpd
from shapely.geometry import Point
# Step 1: Geocode the city name
response = requests.get(
"https://nominatim.openstreetmap.org/search",
params={"q": "5, rue Alphonse Weicker Luxembourg", "format": "json", "limit": 1},
headers={"User-Agent": "funathon-project3"},
)
result = response.json()[0]
lon, lat = float(result["lon"]), float(result["lat"])
print(f"Eurostat coordinates: lon={lon}, lat={lat}")
# Step 2: Create a GeoDataFrame with the point in WGS84, then reproject
city_point = gpd.GeoDataFrame(
{"city": ["Luxembourg"]}, geometry=[Point(lon, lat)], crs="EPSG:4326"
)
city_point = city_point.to_crs("EPSG:3035")
# Step 3: Load NUTS3 boundaries and spatial join
nuts_url = (
"https://gisco-services.ec.europa.eu/distribution/v2/"
"nuts/geojson/NUTS_RG_01M_2021_3035_LEVL_3.geojson"
)
nuts = gpd.read_file(nuts_url)
city_nuts = gpd.sjoin(city_point, nuts, predicate="within")
nuts_code = city_nuts.iloc[0]["NUTS_ID"]
print(f"NUTS3 region: {nuts_code}") # → LU000Eurostat coordinates: lon=6.1695145, lat=49.6335945
NUTS3 region: LU000
Warning
Stay within the supported regions. The code above will compute a NUTS3 code for any city worldwide, but the rest of this notebook — and all the exercises that follow — only have pre-processed tiles for the regions listed in the Available regions table above (e.g. LU000, BE100, FRJ27, …). If your city falls outside those regions, the S3 URL built in the next step will point at an empty prefix and every downstream exercise will fail to load any data. Pick a city inside one of the supported NUTS3 regions before continuing.
Once you have the NUTS3 code, you can build the S3 base URL for tiles in that region:
#| eval: false
base_url = f"s3://projet-funathon/2026/project3/data/images/{nuts_code}"
print(base_url)
Tip
Learn more: Nominatim API docs
CautionExercise 4 — Geocode a city and build a tile URL
Goal: Pick a city of your choice, find its NUTS3 region via geocoding + spatial join, and build the S3 URL prefix for that region’s tiles.
Steps:
- Geocode your chosen city using the Nominatim API
- Create a
Point(lon, lat)geometry and wrap it in a GeoDataFrame (CRS: EPSG:4326) - Reproject to EPSG:3035 and spatial-join with the NUTS3 boundaries
- Check if the resulting NUTS3 code is in the list of available regions
- Build the S3 base URL:
s3://projet-funathon/2026/project3/data/images/{nuts_code}
TipHint — Exercise 4
- Nominatim params:
{"q": "City, Country", "format": "json", "limit": 1}. Always include aUser-Agentheader. - Coordinates:
Point(lon, lat)— longitude first, latitude second. - Initial CRS is
"EPSG:4326"(WGS84), reproject to"EPSG:3035"to match the NUTS3 boundaries. - Use
predicate="within"for the spatial join (point inside polygon). - The NUTS3 code column is
"NUTS_ID".
Code template:
import requests
import geopandas as gpd
from shapely.geometry import Point
# Step 1: Geocode
response = requests.get(
"https://nominatim.openstreetmap.org/search",
params={"q": ___, "format": "json", "limit": 1}, # TODO: city name
headers={"User-Agent": "funathon-project3"},
)
result = response.json()[0]
lon, lat = ___, ___ # TODO: extract coordinates
# Step 2: Create GeoDataFrame and reproject
city_point = gpd.GeoDataFrame(
{"city": [___]},
geometry=[Point(___, ___)],
crs=___, # TODO
)
city_point = city_point.to_crs(___) # TODO: target CRS
# Step 3: Load NUTS3 boundaries and spatial join
nuts_url = (
"https://gisco-services.ec.europa.eu/distribution/v2/"
"nuts/geojson/NUTS_RG_01M_2021_3035_LEVL_3.geojson"
)
nuts = gpd.read_file(nuts_url)
city_nuts = gpd.sjoin(___, ___, predicate=___) # TODO
nuts_code = city_nuts.iloc[0][___] # TODO: column name
# Step 4: Check availability
available = [
"AT332",
"BE100",
"BE251",
"BG322",
"CY000",
"CZ072",
"DEA54",
"DK041",
"EE00A",
"EL521",
"ES612",
"FI1C1",
"FRJ27",
"FRK26",
"HR050",
"IE061",
"ITI32",
"LT028",
"LU000",
"LV008",
"MT001",
"NL33C",
"PL414",
"PT16I",
"RO123",
"SE311",
"SI035",
"SK022",
"UKJ22",
]
print(f"NUTS3 code: {nuts_code}, available: {nuts_code in available}")
# Step 5: Build S3 URL
base_url = f"s3://projet-funathon/2026/project3/data/images/{___}" # TODO
print(base_url)
TipSolution — Exercise 4
import requests
import geopandas as gpd
from shapely.geometry import Point
# Step 1: Geocode Brussels
response = requests.get(
"https://nominatim.openstreetmap.org/search",
params={"q": "Brussels, Belgium", "format": "json", "limit": 1},
headers={"User-Agent": "funathon-project3"},
)
result = response.json()[0]
lon, lat = float(result["lon"]), float(result["lat"])
print(f"Brussels coordinates: lon={lon}, lat={lat}")
# Step 2: Create GeoDataFrame and reproject
city_point = gpd.GeoDataFrame(
{"city": ["Brussels"]}, geometry=[Point(lon, lat)], crs="EPSG:4326"
)
city_point = city_point.to_crs("EPSG:3035")
# Step 3: Load NUTS3 boundaries and spatial join
nuts_url = (
"https://gisco-services.ec.europa.eu/distribution/v2/"
"nuts/geojson/NUTS_RG_01M_2021_3035_LEVL_3.geojson"
)
nuts = gpd.read_file(nuts_url)
city_nuts = gpd.sjoin(city_point, nuts, predicate="within")
nuts_code = city_nuts.iloc[0]["NUTS_ID"]
print(f"NUTS3 region: {nuts_code}") # → BE100
# Step 4: Check availability
available = [
"AT332",
"BE100",
"BE251",
"BG322",
"CY000",
"CZ072",
"DEA54",
"DK041",
"EE00A",
"EL521",
"ES612",
"FI1C1",
"FRJ27",
"FRK26",
"HR050",
"IE061",
"ITI32",
"LT028",
"LU000",
"LV008",
"MT001",
"NL33C",
"PL414",
"PT16I",
"RO123",
"SE311",
"SI035",
"SK022",
"UKJ22",
]
print(f"Available: {nuts_code in available}") # → True
# Step 5: Build S3 URL
base_url = f"s3://projet-funathon/2026/project3/data/images/{nuts_code}" # TODO
print(base_url)2.4 Retrieving a tile for a specific city
After finding the NUTS3 code, you know which region directory to look in — but there may be hundreds of tiles in that directory (e.g. LU000/2024 has 351 tiles). To find the specific tile that covers your city, use the filename2bbox.parquet index file. Each region/year directory contains one such file with two columns: filename (the .tif name) and bbox (a list [xmin, ymin, xmax, ymax] in EPSG:3035). It lets you check which tile’s bounding box contains your city’s coordinates without listing the full directory.
The workflow is straightforward: read the parquet file, extract the city’s EPSG:3035 coordinates, and check which tile’s bounding box contains those coordinates.
Here is a complete example that continues from the Luxembourg geocoding above:
import pandas as pd
import rasterio
import numpy as np
import matplotlib.pyplot as plt
# Build the URL to the parquet index
year = 2024
nuts_code = "LU000"
parquet_url = (
f"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
f"project3/data/images/{nuts_code}/{year}/filename2bbox.parquet"
)
# Read the tile index
tiles = pd.read_parquet(parquet_url)
print(f"{len(tiles)} tiles in {nuts_code}/{year}")
# Get city coordinates in EPSG:3035
x = city_point.geometry.iloc[0].x
y = city_point.geometry.iloc[0].y
print(f"City point (EPSG:3035): x={x:.0f}, y={y:.0f}")
# Find the tile whose bbox contains the city point
tile_filename = None
for _, row in tiles.iterrows():
xmin, ymin, xmax, ymax = row["bbox"]
if xmin <= x <= xmax and ymin <= y <= ymax:
tile_filename = row["filename"]
break
print(f"Matching tile: {tile_filename}")
# Build the full HTTPS URL
tile_url = (
f"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
f"project3/data/images/{nuts_code}/{year}/{tile_filename}"
)
# Open the tile and display the RGB composite
with rasterio.open(tile_url) as src:
rgb_data = src.read([4, 3, 2]) # Red, Green, Blue bands
tile_crs = src.crs
tile_bounds = src.bounds
rgb = np.transpose(rgb_data, (1, 2, 0)).astype(np.float32)
rgb = np.clip(rgb / np.percentile(rgb, 98), 0, 1)
fig, ax = plt.subplots(figsize=(5, 5))
ax.imshow(rgb)
ax.set_title(f"Sentinel-2 — {tile_filename}")
ax.axis("off")
plt.tight_layout()
plt.show()351 tiles in LU000/2024
City point (EPSG:3035): x=4044386, y=2953974
Matching tile: 4042000_2951690_0_637.tif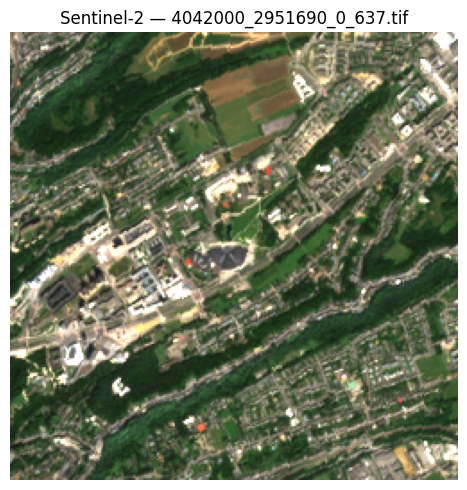
CautionExercise 5 — Find and display the satellite tile for your city
Goal: Use the filename2bbox.parquet index to find which tile covers your city (from Exercise 4), download it, and display the RGB composite.
Steps:
- Build the HTTPS URL to the
filename2bbox.parquetfile for your NUTS region and year 2024 - Read the parquet file with
pd.read_parquet() - Extract the city’s EPSG:3035 coordinates from
city_point - Loop through the tile bounding boxes to find which one contains your city
- Build the full HTTPS URL for the matching tile
- Open the tile with
rasterio.open(), read the RGB bands, normalize, and display
TipHint — Exercise 5
- The parquet URL pattern is:
https://minio.lab.sspcloud.fr/projet-funathon/2026/project3/data/images/{nuts_code}/{year}/filename2bbox.parquet pd.read_parquet(url)reads directly from an HTTPS URL (requirespyarrow).- City coordinates:
city_point.geometry.iloc[0].xand.y— already in EPSG:3035 from Exercise 4. - Containment check:
xmin <= x <= xmax and ymin <= y <= ymax. - The tile URL uses the same base path as the parquet URL, replacing
filename2bbox.parquetwith the tile filename. - RGB normalization: same technique as Exercise 1 — read bands
[4, 3, 2], transpose to(H, W, 3), divide by 98th percentile, clip to[0, 1].
Code template:
import pandas as pd
import rasterio
import numpy as np
import matplotlib.pyplot as plt
# Step 1: Build the parquet URL
year = 2024
parquet_url = ___ # TODO: f"https://minio.lab.sspcloud.fr/.../{nuts_code}/{year}/filename2bbox.parquet"
# Step 2: Read the tile index
tiles = ___ # TODO: pd.read_parquet(...)
print(f"{len(tiles)} tiles available")
# Step 3: Get city coordinates in EPSG:3035
x = ___ # TODO: city_point.geometry.iloc[0].x
y = ___ # TODO: city_point.geometry.iloc[0].y
# Step 4: Find the matching tile
tile_filename = None
for _, row in tiles.iterrows():
xmin, ymin, xmax, ymax = ___ # TODO: unpack row["bbox"]
if ___: # TODO: check xmin <= x <= xmax and ymin <= y <= ymax
tile_filename = row["filename"]
break
print(f"Matching tile: {tile_filename}")
# Step 5: Build the full tile URL
tile_url = ___ # TODO
# Step 6: Open, read RGB, normalize and display
with rasterio.open(tile_url) as src:
rgb_data = ___ # TODO: src.read([4, 3, 2])
tile_crs = src.crs
tile_bounds = src.bounds
rgb = np.transpose(rgb_data, (1, 2, 0)).astype(np.float32)
rgb = np.clip(rgb / np.percentile(rgb, 98), 0, 1)
fig, ax = plt.subplots(figsize=(5, 5))
ax.imshow(rgb)
ax.set_title(f"Sentinel-2 — {tile_filename}")
ax.axis("off")
plt.tight_layout()
plt.show()
TipSolution — Exercise 5
import pandas as pd
import rasterio
import numpy as np
import matplotlib.pyplot as plt
# Step 1: Build the parquet URL
year = 2024
parquet_url = (
f"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
f"project3/data/images/{nuts_code}/{year}/filename2bbox.parquet"
)
# Step 2: Read the tile index
tiles = pd.read_parquet(parquet_url)
print(f"{len(tiles)} tiles available")
# Step 3: Get city coordinates in EPSG:3035
x = city_point.geometry.iloc[0].x
y = city_point.geometry.iloc[0].y
# Step 4: Find the matching tile
tile_filename = None
for _, row in tiles.iterrows():
xmin, ymin, xmax, ymax = row["bbox"]
if xmin <= x <= xmax and ymin <= y <= ymax:
tile_filename = row["filename"]
break
print(f"Matching tile: {tile_filename}")
# Step 5: Build the full tile URL
tile_url = (
f"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
f"project3/data/images/{nuts_code}/{year}/{tile_filename}"
)
# Step 6: Open, read RGB, normalize and display
with rasterio.open(tile_url) as src:
rgb_data = src.read([4, 3, 2])
tile_crs = src.crs
tile_bounds = src.bounds
rgb = np.transpose(rgb_data, (1, 2, 0)).astype(np.float32)
rgb = np.clip(rgb / np.percentile(rgb, 98), 0, 1)
fig, ax = plt.subplots(figsize=(5, 5))
ax.imshow(rgb)
ax.set_title(f"Sentinel-2 — {tile_filename}")
ax.axis("off")
plt.tight_layout()
plt.show()3 Geo-manipulation with GeoPandas
Satellite imagery is inherently geospatial: each pixel corresponds to a precise location on Earth. Before diving into machine-learning pipelines, it is important to know how to manipulate geographic data. GeoPandas extends pandas with geometry support, making CRS transforms, spatial joins, and plotting straightforward.
Vector vs. raster data. So far you have worked with raster data — grids of pixels (satellite images). Geographic boundaries (countries, regions, parcels) are typically stored as vector data — points, lines, and polygons defined by coordinates. GeoPandas lets you work with vector data in a tabular format (like a pandas DataFrame, but with a geometry column).
Tip
Learn more: GeoPandas docs · Shapely docs
3.1 Coordinate Reference Systems
Every raster and vector dataset is tied to a coordinate reference system (CRS) that defines how coordinates map to locations on Earth. CRS mismatch is the single most common source of silent bugs in geospatial work — a join, overlay or distance computation between two layers in different CRS will not raise an error; it will simply return wrong or empty results. The two CRS you will encounter most often in this project are:
| CRS | EPSG Code | Units | Use case |
|---|---|---|---|
| WGS 84 | 4326 | Degrees (lat/lon) | GPS, web maps, bounding-box queries |
| ETRS89-LAEA | 3035 | Metres | European statistical grids, CLC+ patches |
Warning
CRS mismatch is the #1 source of bugs in geospatial projects. If two layers use different CRS, spatial operations (joins, overlays, distance calculations) will produce wrong or empty results. Always check .crs before combining datasets, and use .to_crs() to align them.
Converting between them is a one-liner with GeoPandas:
import geopandas as gpd
from shapely.geometry import box
# Create a GeoDataFrame with the tile extent in EPSG:3035
tile_geom = box(*tile_bounds)
gdf = gpd.GeoDataFrame({"tile": ["LU000"]}, geometry=[tile_geom], crs="EPSG:3035")
print("EPSG:3035 bounds:")
print(gdf.total_bounds)
# Convert to WGS84 (latitude/longitude)
gdf_wgs84 = gdf.to_crs("EPSG:4326")
print("\nEPSG:4326 bounds:")
print(gdf_wgs84.total_bounds)EPSG:3035 bounds:
[4042000. 2951690. 4044500. 2954190.]
EPSG:4326 bounds:
[ 6.13636681 49.61196423 6.17270527 49.63558621]
Tip
Learn more: epsg.io — search and visualize any coordinate reference system.
3.2 Working with GeoDataFrames
In practice, you can build a GeoDataFrame directly from rasterio metadata — no filename parsing needed:
tile_gdf = gpd.GeoDataFrame(
{"tile": ["LU000"], "year": [2024]},
geometry=[box(*tile_bounds)],
crs=tile_crs,
)
tile_gdf| tile | year | geometry | |
|---|---|---|---|
| 0 | LU000 | 2024 | POLYGON ((4044500 2951690, 4044500 2954190, 40... |
3.3 Overlaying boundaries on images
Combining a raster image with vector boundaries is a common operation. Use imshow with the extent parameter to position the image in coordinate space, then overlay the GeoDataFrame boundary:
fig, ax = plt.subplots(figsize=(6, 6))
extent = [tile_bounds.left, tile_bounds.right, tile_bounds.bottom, tile_bounds.top]
ax.imshow(rgb, extent=extent)
tile_gdf.boundary.plot(ax=ax, color="red", linewidth=2)
ax.set_xlabel("Easting (m)")
ax.set_ylabel("Northing (m)")
ax.set_title("Sentinel-2 tile with boundary overlay (EPSG:3035)")
plt.tight_layout()
plt.show()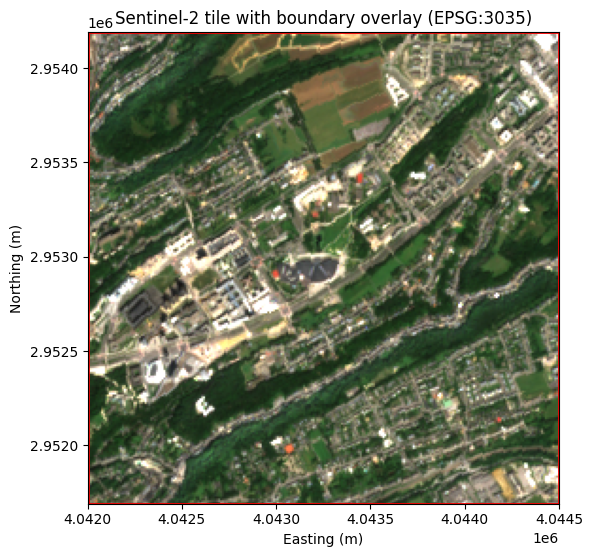
CautionExercise 6 — Build a GeoDataFrame from tile bounds and convert CRS
Goal: Create a GeoDataFrame from the tile’s bounding box, then convert it from EPSG:3035 to EPSG:4326 (WGS84). Print the bounds in both CRS.
Steps:
- Create a
shapely.geometry.boxfromtile_bounds - Build a
GeoDataFramewith that geometry andcrs="EPSG:3035" - Convert to EPSG:4326 using
.to_crs() - Print
total_boundsin both CRS
TipHint — Exercise 6
box(*tile_bounds)unpacks(left, bottom, right, top)into a rectangular polygon.gpd.GeoDataFrame({"tile": ["LU000"]}, geometry=[tile_geom], crs="EPSG:3035")creates the GeoDataFrame..to_crs("EPSG:4326")reprojects to latitude/longitude.
Code template:
import geopandas as gpd
from shapely.geometry import box
# Step 1: Create a box geometry from tile_bounds
tile_geom = ___ # TODO: box(*tile_bounds)
# Step 2: Build a GeoDataFrame in EPSG:3035
gdf = ___ # TODO: gpd.GeoDataFrame(...)
# Step 3: Convert to WGS84
gdf_wgs84 = ___ # TODO: gdf.to_crs(...)
# Step 4: Print bounds in both CRS
print("EPSG:3035 bounds:", gdf.total_bounds)
print("EPSG:4326 bounds:", gdf_wgs84.total_bounds)
TipSolution — Exercise 6
import geopandas as gpd
from shapely.geometry import box
tile_geom = box(*tile_bounds)
gdf = gpd.GeoDataFrame({"tile": ["LU000"]}, geometry=[tile_geom], crs="EPSG:3035")
gdf_wgs84 = gdf.to_crs("EPSG:4326")
print("EPSG:3035 bounds:", gdf.total_bounds)
print("EPSG:4326 bounds:", gdf_wgs84.total_bounds)
CautionExercise 7 — Spatial join with NUTS3 regions
Goal: Identify which NUTS3 region(s) a Sentinel-2 tile intersects using a spatial join, and compute the tile’s area in km².
A spatial join (gpd.sjoin) combines two GeoDataFrames based on the geometric relationship between their features (e.g. intersects, contains, within). This is useful for linking raster tiles to administrative boundaries.
Steps:
- Load NUTS3 boundaries from the Eurostat GeoJSON endpoint (EPSG:3035)
- Create a GeoDataFrame for the tile (reuse
tile_boundsandtile_crsfrom Exercise 1) - Perform a spatial join with
predicate="intersects" - Print the matching NUTS_ID and NUTS_NAME
- Compute the tile area in km² (
tile_geom.area / 1e6)
TipHint — Exercise 7
gpd.read_file(url)can read GeoJSON directly from a URL.- Build the tile GeoDataFrame the same way as in Exercise 6:
gpd.GeoDataFrame({"tile": ["LU000"]}, geometry=[box(*tile_bounds)], crs=tile_crs). gpd.sjoin(left, right, predicate="intersects")returns rows fromleftenriched with columns fromrightwhere geometries intersect.- Since
tile_crsis EPSG:3035 (units in metres),tile_geom.areagives square metres — divide by 1 000 000 for km².
Code template:
import geopandas as gpd
from shapely.geometry import box
# Step 7a: Load NUTS3 boundaries (EPSG:3035)
nuts_url = (
"https://gisco-services.ec.europa.eu/distribution/v2/"
"nuts/geojson/NUTS_RG_01M_2021_3035_LEVL_3.geojson"
)
nuts = ___ # TODO: gpd.read_file(nuts_url)
# Step 7b: Create a GeoDataFrame for the tile
tile_geom = box(*tile_bounds)
tile_gdf = ___ # TODO: gpd.GeoDataFrame(..., geometry=[tile_geom], crs=tile_crs)
# Step 7c: Spatial join — find which NUTS3 regions the tile intersects
joined = ___ # TODO: gpd.sjoin(tile_gdf, nuts, predicate="intersects")
# Step 7d: Print matching regions
for _, row in joined.iterrows():
print(f"NUTS_ID: {row['NUTS_ID']}, NUTS_NAME: {row['NUTS_NAME']}")
# Step 7e: Compute tile area in km²
area_km2 = ___ # TODO: tile_geom.area / 1e6
print(f"Tile area: {area_km2:.2f} km²")
TipSolution — Exercise 7
import geopandas as gpd
from shapely.geometry import box
nuts_url = (
"https://gisco-services.ec.europa.eu/distribution/v2/"
"nuts/geojson/NUTS_RG_01M_2021_3035_LEVL_3.geojson"
)
nuts = gpd.read_file(nuts_url)
tile_geom = box(*tile_bounds)
tile_gdf = gpd.GeoDataFrame(
{"tile": ["LU000"]}, geometry=[tile_geom], crs=tile_crs
)
# Spatial join: for each tile geometry, attach the columns of every NUTS3 region
# whose geometry satisfies the predicate. `predicate="intersects"` keeps any region
# that touches the tile (even partially); alternatives are "within" (tile fully
# inside region) or "contains" (region fully inside tile). A tile straddling a
# border can therefore match several NUTS3 regions — hence the loop below.
joined = gpd.sjoin(tile_gdf, nuts, predicate="intersects")
for _, row in joined.iterrows():
print(f"NUTS_ID: {row['NUTS_ID']}, NUTS_NAME: {row['NUTS_NAME']}")
# tile_geom is in EPSG:3035 whose unit is the metre, so .area is in m². Divide by
# 1e6 to get km². Computing area on a geographic CRS like EPSG:4326 (degrees) would
# give a meaningless figure — always use a metric projection for measurements.
area_km2 = tile_geom.area / 1e6
print(f"Tile area: {area_km2:.2f} km²")3.4 Displaying satellite images on a map
3.4.1 Static map with matplotlib
To display the satellite image in geographic coordinates (latitude/longitude), reproject the bounds to WGS84 using rasterio.warp.transform_bounds:
from rasterio.warp import transform_bounds
west, south, east, north = transform_bounds(
tile_crs, "EPSG:4326", *tile_bounds
)
print(f"WGS84 extent: W={west:.4f}, S={south:.4f}, E={east:.4f}, N={north:.4f}")
fig, ax = plt.subplots(figsize=(6, 6))
ax.imshow(rgb, extent=[west, east, south, north])
ax.set_xlabel("Longitude")
ax.set_ylabel("Latitude")
ax.set_title("Sentinel-2 tile in WGS84 coordinates")
plt.tight_layout()
plt.show()WGS84 extent: W=6.1364, S=49.6120, E=6.1727, N=49.6356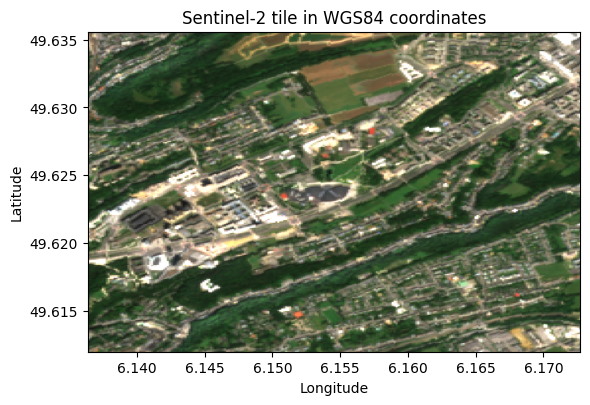
3.4.2 Interactive map with folium
For an interactive web map, use Folium to overlay the satellite image on a basemap.
Important
Reproject the pixels, not just the bounds. Folium and the underlying Leaflet library only render tiles in WGS84 (EPSG:4326, lat/lon). Our Sentinel-2 tile lives in EPSG:3035 (a metric projection used across Europe), so giving Folium the EPSG:3035 pixels with a WGS84 bounding box would stretch the image into the WGS84 rectangle — pixels would shift compared to the basemap, and the distortion grows the farther north you are. To get a correctly aligned overlay we have to resample the pixels themselves onto a WGS84 grid using rasterio.warp.reproject, then hand Folium the warped array. This is the same pipeline used in the inference section.
import folium
import numpy as np
from folium.raster_layers import ImageOverlay
from rasterio.transform import from_bounds
from rasterio.warp import (
transform_bounds,
reproject,
Resampling,
calculate_default_transform,
)
from rasterio.crs import CRS
dst_crs = CRS.from_epsg(4326)
# rgb_data is the raw (3, H, W) array of R/G/B reflectances in EPSG:3035.
# Derive the source affine transform from the bounds and shape.
h, w = rgb_data.shape[1], rgb_data.shape[2]
src_transform = from_bounds(*tile_bounds, w, h)
# calculate_default_transform picks an output grid in EPSG:4326 that covers the
# same area; reproject() then resamples each band onto that grid.
dst_transform, dst_w, dst_h = calculate_default_transform(
tile_crs, dst_crs, w, h, *tile_bounds
)
rgb_wgs84_bands = np.zeros((3, dst_h, dst_w), dtype=np.float32)
for i in range(3):
reproject(
source=rgb_data[i].astype(np.float32),
destination=rgb_wgs84_bands[i],
src_transform=src_transform,
src_crs=tile_crs,
dst_transform=dst_transform,
dst_crs=dst_crs,
resampling=Resampling.bilinear, # bilinear for continuous reflectance values
)
p98 = np.percentile(rgb_wgs84_bands[rgb_wgs84_bands > 0], 98)
rgb_wgs84 = np.clip(np.transpose(rgb_wgs84_bands, (1, 2, 0)) / p98, 0, 1)
# Reprojection from a tilted source produces empty triangular corners. Build an
# alpha channel from "where was there any data?" so those corners stay transparent.
alpha = (rgb_wgs84_bands.max(axis=0) > 0).astype(np.float32)
rgba_wgs84 = np.dstack([rgb_wgs84, alpha])
west, south, east, north = transform_bounds(tile_crs, dst_crs, *tile_bounds)
center_lat = (south + north) / 2
center_lon = (west + east) / 2
m = folium.Map(location=[center_lat, center_lon], zoom_start=14)
ImageOverlay(
image=rgba_wgs84,
bounds=[[south, west], [north, east]],
opacity=0.7,
).add_to(m)
mMake this Notebook Trusted to load map: File -> Trust Notebook
Tip
Learn more: Folium docs
CautionExercise 8 — Display a Sentinel-2 tile on an interactive folium map
Goal: Reproject the RGB image to WGS84 and display it on an interactive folium map. Because Folium only renders EPSG:4326 tiles, you must warp the pixels — not just the bounding box — onto a WGS84 grid.
Steps:
- Use
calculate_default_transform()to compute the output grid in EPSG:4326 - Call
reproject()once per RGB band withResampling.bilinearto warp the pixels onto that grid - Normalize the warped bands to
[0, 1]and build an alpha channel from the data mask (transparent corners) - Use
transform_bounds()to get the WGS84(west, south, east, north)of the tile - Create a
folium.Mapcentred on the tile and add anImageOverlaywith the warped RGBA array
TipHint — Exercise 8
calculate_default_transform(tile_crs, dst_crs, w, h, *tile_bounds)returns the WGS84 grid that covers the same area.- Loop over the 3 RGB bands and call
reproject(...)per band, writing into the corresponding slice ofrgb_wgs84_bands(shape == (3, dst_h, dst_w)). - Use
Resampling.bilinearfor reflectance (continuous values).Resampling.nearestis for categorical rasters like labels. alpha = (rgb_wgs84_bands.max(axis=0) > 0).astype(np.float32)turns the empty triangular corners (from the rotated source) into transparent pixels.transform_bounds(tile_crs, "EPSG:4326", *tile_bounds)returns(west, south, east, north)in degrees.ImageOverlay(image=rgba_wgs84, bounds=[[south, west], [north, east]], opacity=0.7).add_to(m)overlays the warped image.
Code template:
import folium
import numpy as np
from folium.raster_layers import ImageOverlay
from rasterio.transform import from_bounds
from rasterio.warp import (
transform_bounds,
reproject,
Resampling,
calculate_default_transform,
)
from rasterio.crs import CRS
dst_crs = CRS.from_epsg(4326)
# Step 1: Compute the WGS84 output grid
h, w = rgb_data.shape[1], rgb_data.shape[2]
src_transform = from_bounds(*tile_bounds, w, h)
dst_transform, dst_w, dst_h = ___ # TODO: calculate_default_transform(...)
# Step 2: Reproject each band onto that grid
rgb_wgs84_bands = np.zeros((3, dst_h, dst_w), dtype=np.float32)
for i in range(3):
reproject(
source=rgb_data[i].astype(np.float32),
destination=rgb_wgs84_bands[i],
src_transform=src_transform,
src_crs=___, # TODO: source CRS
dst_transform=dst_transform,
dst_crs=___, # TODO: destination CRS
resampling=___, # TODO: Resampling.bilinear (continuous values)
)
# Step 3: Normalize + alpha channel for transparent corners
p98 = np.percentile(rgb_wgs84_bands[rgb_wgs84_bands > 0], 98)
rgb_wgs84 = np.clip(np.transpose(rgb_wgs84_bands, (1, 2, 0)) / p98, 0, 1)
alpha = ___ # TODO: (rgb_wgs84_bands.max(axis=0) > 0).astype(np.float32)
rgba_wgs84 = np.dstack([rgb_wgs84, alpha])
# Step 4: Reproject the bounds and pick a centre
west, south, east, north = ___ # TODO: transform_bounds(...)
center_lat = ___ # TODO
center_lon = ___ # TODO
# Step 5: Build the folium map
m = ___ # TODO: folium.Map(...)
___ # TODO: ImageOverlay(image=rgba_wgs84, ...).add_to(m)
m
TipSolution — Exercise 8
import folium
import numpy as np
from folium.raster_layers import ImageOverlay
from rasterio.transform import from_bounds
from rasterio.warp import (
transform_bounds,
reproject,
Resampling,
calculate_default_transform,
)
from rasterio.crs import CRS
dst_crs = CRS.from_epsg(4326)
# Step 1: Compute the WGS84 output grid that covers the tile
h, w = rgb_data.shape[1], rgb_data.shape[2]
src_transform = from_bounds(*tile_bounds, w, h)
dst_transform, dst_w, dst_h = calculate_default_transform(
tile_crs, dst_crs, w, h, *tile_bounds
)
# Step 2: Reproject each RGB band onto that grid
rgb_wgs84_bands = np.zeros((3, dst_h, dst_w), dtype=np.float32)
for i in range(3):
reproject(
source=rgb_data[i].astype(np.float32),
destination=rgb_wgs84_bands[i],
src_transform=src_transform,
src_crs=tile_crs,
dst_transform=dst_transform,
dst_crs=dst_crs,
resampling=Resampling.bilinear,
)
# Step 3: Normalize to [0, 1] and build the alpha channel
p98 = np.percentile(rgb_wgs84_bands[rgb_wgs84_bands > 0], 98)
rgb_wgs84 = np.clip(np.transpose(rgb_wgs84_bands, (1, 2, 0)) / p98, 0, 1)
alpha = (rgb_wgs84_bands.max(axis=0) > 0).astype(np.float32)
rgba_wgs84 = np.dstack([rgb_wgs84, alpha])
# Step 4: Reproject the bounds and centre the map
west, south, east, north = transform_bounds(tile_crs, dst_crs, *tile_bounds)
center_lat = (south + north) / 2
center_lon = (west + east) / 2
# Step 5: Build the map
m = folium.Map(location=[center_lat, center_lon], zoom_start=14)
ImageOverlay(
image=rgba_wgs84,
bounds=[[south, west], [north, east]],
opacity=0.7,
).add_to(m)
m4 CLC+ Backbone Labels — Land-Cover Ground Truth
In supervised machine learning, you need pairs of inputs and labels to train a model. The inputs are the Sentinel-2 satellite images; the labels are provided by CLC+ Backbone, a high-resolution land-cover product from the Copernicus Land Monitoring Service.
What does CLC stand for? CLC is short for CORINE Land Cover (Coordination of Information on the Environment — Land Cover), the European reference inventory of land cover and land use. First produced in 1990 and updated roughly every six years, it has long been the standard product for tracking land-cover change across Europe. CLC+ Backbone is the next-generation evolution of this programme: instead of the original 44 hierarchical classes mapped at 100 m resolution from manually delineated polygons, it delivers a pixel-level raster at 10 m resolution with a simplified set of 10 land-cover classes, derived automatically from Sentinel-2 imagery — which makes it directly suitable as ground truth for a deep-learning segmentation model.
CLC+ Backbone provides pixel-level land-cover classification across Europe at 10 m resolution, making it an ideal ground-truth dataset for training and evaluating segmentation models. The labels are temporally aligned with the satellite imagery (same year), ensuring that the land-cover classification corresponds to what the satellite actually observed.
Why 2021? CLC+ Backbone’s most recent public release at the time of writing is the 2021 edition, so that’s the year we use for labels. Each label is paired with a Sentinel-2 image from the same year — land cover actually changes between years (new construction, deforestation, crop rotation), and mismatched pairs would teach the model to predict yesterday’s ground truth for today’s image. The 2024 Sentinel-2 imagery you saw in the earlier exercises is kept for Chapter 3, where we run the trained model on new images that have no label — which is the whole point of training a model in the first place.
4.1 Land-cover classes
CLC+ Backbone uses 10 land-cover classes:
| Class ID | Name | Description |
|---|---|---|
| 1 | Sealed | Buildings, roads, paved surfaces |
| 2 | Woody – needle leaved | Coniferous forests |
| 3 | Woody – broadleaved deciduous | Deciduous forests |
| 4 | Woody – broadleaved evergreen | Evergreen broadleaved forests |
| 5 | Low-growing woody plants | Bushes, shrubs |
| 6 | Permanent herbaceous | Grasslands, meadows |
| 7 | Periodically herbaceous | Croplands |
| 8 | Lichens and mosses | Natural low vegetation |
| 9 | Non- and sparsely-vegetated | Bare soil, rock |
| 10 | Water | Rivers, lakes, sea |
Note
Nodata values. The raw CLC+ raster may contain values 254 and 255, which represent “unclassified” and “nodata” respectively. The tiff_to_numpy() utility maps these to 0 so they do not interfere with the 1–10 class range.
4.2 How labels are stored on S3
Pre-processed CLC+ Backbone labels are publicly available on the SSP Cloud object storage, alongside the satellite images. Each label is a 2D NumPy array (.npy file) of shape (250, 250) with uint8 values representing land-cover class IDs (1–10, with 0 for nodata).
The HTTPS URL follows this pattern:
https://minio.lab.sspcloud.fr/projet-funathon/2026/project3/data/labels/{NUTS}/{year}/{patch_id}.npyThe label and image paths mirror each other — to find the label for a given image, replace images with labels and .tif with .npy:
.../data/images/{NUTS}/{year}/{patch_id}.tif ← satellite image (GeoTIFF)
.../data/labels/{NUTS}/{year}/{patch_id}.npy ← land-cover label (NumPy)The {patch_id} encodes {xmin}_{ymin}_{idx}_{id} in EPSG:3035 metres and is identical between images and labels.
Note
Loading .npy from a URL. Unlike GeoTIFF files (which rasterio can open directly from a URL), .npy files must be fetched into memory first. The three-step idiom is:
urllib.request.urlopen(url)— opens the remote URL and lets you call.read()on it to pull down the raw bytes.io.BytesIO(response.read())— wraps those raw bytes in an in-memory file-like object. This step exists becausenp.loadexpects something it can call.read()on (a file handle or an equivalent stream), not a plainbytesvalue.np.load(...)— parses that stream back into a NumPy array.
.npy files contain no embedded CRS or bounds metadata — the spatial information is encoded in the filename and matches the corresponding image tile.
Tip
Learn more: CLC+ Backbone product page · Copernicus Land Monitoring Service
4.3 Loading and displaying a label
Let’s load a CLC+ label from S3 and display it next to its matching satellite image. The three-step pattern for loading a .npy file over HTTPS is: open the URL → read into a bytes buffer → load with NumPy.
import urllib.request
import io
import numpy as np
# Label URL for a LU000 patch, year 2021
label_url = (
"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
"project3/data/labels/LU000/"
"2021/4042000_2951690_0_637.npy"
)
with urllib.request.urlopen(label_url) as response:
label_array = np.load(io.BytesIO(response.read()))
print(f"Label shape: {label_array.shape}")
print(f"Data type: {label_array.dtype}")
print(f"Classes: {np.unique(label_array)}")Label shape: (250, 250)
Data type: uint8
Classes: [ 1 2 3 5 6 7 9 10]We can visualise the label using a custom colormap that assigns a colour to each of the 10 land-cover classes:
import rasterio
import matplotlib.pyplot as plt
from matplotlib.colors import ListedColormap
from matplotlib.patches import Patch
# CLC+ class names and colours
classes = [
("Sealed (1)", "#FF0100"),
("Woody -- needle leaved trees (2)", "#238B23"),
("Woody -- Broadleaved deciduous trees (3)", "#80FF00"),
("Woody -- Broadleaved evergreen trees (4)", "#00FF00"),
("Low-growing woody plants (bushes, shrubs) (5)", "#804000"),
("Permanent herbaceous (6)", "#CCF24E"),
("Periodically herbaceous (7)", "#FEFF80"),
("Lichens and mosses (8)", "#FF81FF"),
("Non- and sparsely-vegetated (9)", "#BFBFBF"),
("Water (10)", "#0080FF"),
]
cmap = ListedColormap([color for _, color in classes])
# Load the matching satellite image
image_url = (
"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
"project3/data/images/LU000/"
"2021/4042000_2951690_0_637.tif"
)
with rasterio.open(image_url) as src:
rgb_data = src.read([4, 3, 2])
rgb = np.transpose(rgb_data, (1, 2, 0)).astype(np.float32)
rgb = np.clip(rgb / np.percentile(rgb, 98), 0, 1)
# Side-by-side plot
fig, axes = plt.subplots(1, 2, figsize=(12, 5))
axes[0].imshow(rgb)
axes[0].set_title("Sentinel-2 RGB")
axes[0].axis("off")
axes[1].imshow(label_array, cmap=cmap, vmin=1, vmax=10)
axes[1].set_title("CLC+ Backbone label")
axes[1].axis("off")
legend_elements = [
Patch(facecolor=color, edgecolor="black", label=label)
for label, color in classes
]
fig.legend(
handles=legend_elements,
loc="center right",
bbox_to_anchor=(1.30, 0.5),
frameon=True,
)
plt.tight_layout()
plt.show()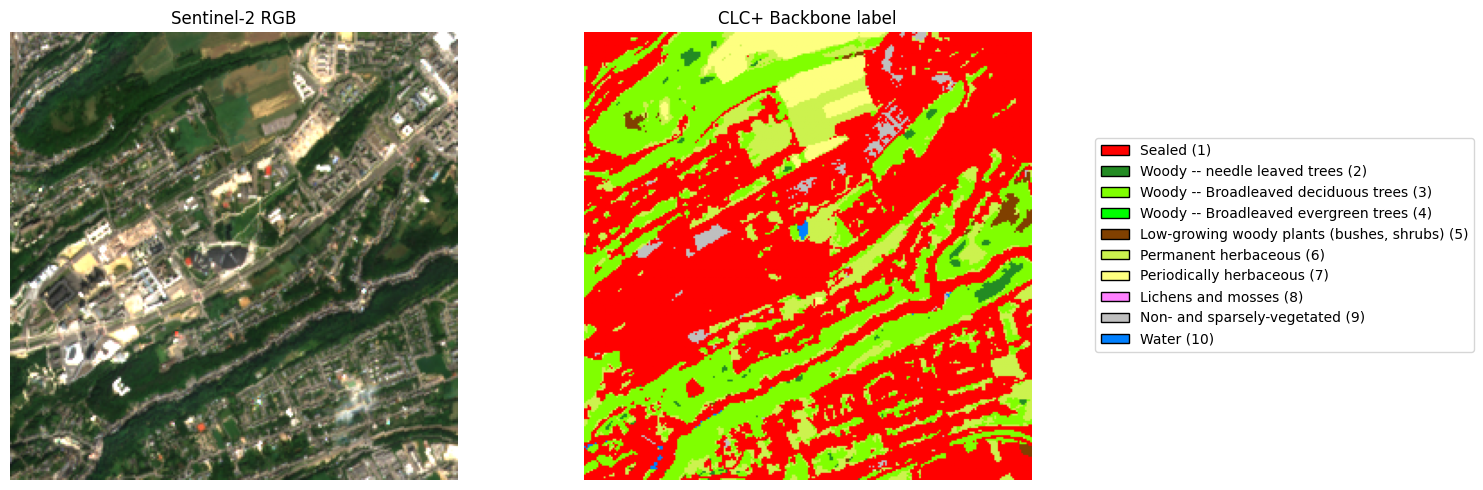
4.4 Label–image alignment — this is the training target
What you just displayed is exactly what the model is trained on. The RGB image on the left is the input; the coloured mask on the right is the target. The entire goal of the segmentation model is this: given a new Sentinel-2 tile that the model has never seen, produce a mask of the same shape with the correct class at every pixel.
This only works because the images and labels are spatially aligned by construction: they share the same CRS (EPSG:3035) and bounding box, and use identical filenames ({xmin}_{ymin}_{idx}_{id}). Pixel (i, j) in the label therefore refers to the same 10 m patch of ground as pixel (i, j) in the image — always. A large collection of such (image, label) pairs is exactly what Chapter 2 feeds to the model during training.
CautionExercise 9 — Load a CLC+ label from S3
Goal: Load the CLC+ Backbone label for a patch of your choice from S3 over HTTPS, and display it with the land-cover colormap.
Steps:
- Choose a NUTS region, year (
2021), and patch ID (you can reuse the tile found in Exercise 5, replacing.tifwith.npy) - Build the HTTPS URL following the label path pattern
- Fetch the
.npyfile usingurllib.request.urlopen()and load it withnp.load(io.BytesIO(...)) - Print the array shape and unique class values
- Display the label using
imshow()with the CLC+ colormap (vmin=1,vmax=10)
TipHint — Exercise 9
- The label URL pattern is:
https://minio.lab.sspcloud.fr/projet-funathon/2026/project3/data/labels/{NUTS}/{year}/{patch_id}.npy - Use
urllib.request.urlopen(url)as a context manager, thennp.load(io.BytesIO(response.read()))to load the array. np.unique(my_label)returns the distinct class IDs present in the tile.- Set
vmin=1, vmax=10inimshow()so the colormap maps correctly to the 10 classes.
Code template:
import urllib.request
import io
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.colors import ListedColormap
# Step 1: Choose your tile
nuts_code = ___ # TODO: e.g. "LU000"
year = ___ # TODO: e.g. 2021
patch_id = ___ # TODO: e.g. "4042000_2951690_0_637"
# Step 2: Build the label URL
label_url = ___ # TODO: f"https://minio.lab.sspcloud.fr/projet-funathon/2026/project3/data/labels/{nuts_code}/{year}/{patch_id}.npy"
# Step 3: Load the label
with urllib.request.urlopen(label_url) as response:
my_label = ___ # TODO: np.load(io.BytesIO(response.read()))
# Step 4: Inspect
print(f"Shape: {___}") # TODO
print(f"Classes: {___}") # TODO
# Step 5: Display with CLC+ colormap
cmap = ListedColormap([
"#FF0100", "#238B23", "#80FF00", "#00FF00", "#804000",
"#CCF24E", "#FEFF80", "#FF81FF", "#BFBFBF", "#0080FF",
])
fig, ax = plt.subplots(figsize=(5, 5))
___ # TODO: ax.imshow(my_label, cmap=cmap, vmin=1, vmax=10)
ax.set_title(f"CLC+ label — {nuts_code}/{year}/{patch_id}")
ax.axis("off")
plt.show()
TipSolution — Exercise 9
import urllib.request
import io
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.colors import ListedColormap
nuts_code = "LU000"
year = 2021
patch_id = "4042000_2951690_0_637"
label_url = f"https://minio.lab.sspcloud.fr/projet-funathon/2026/project3/data/labels/{nuts_code}/{year}/{patch_id}.npy"
with urllib.request.urlopen(label_url) as response:
my_label = np.load(io.BytesIO(response.read()))
print(f"Shape: {my_label.shape}")
print(f"Classes: {np.unique(my_label)}")
cmap = ListedColormap(
[
"#FF0100",
"#238B23",
"#80FF00",
"#00FF00",
"#804000",
"#CCF24E",
"#FEFF80",
"#FF81FF",
"#BFBFBF",
"#0080FF",
]
)
fig, ax = plt.subplots(figsize=(5, 5))
ax.imshow(my_label, cmap=cmap, vmin=1, vmax=10)
ax.set_title(f"CLC+ label — {nuts_code}/{year}/{patch_id}")
ax.axis("off")
plt.show()Before training any model, it is good practice to inspect the training data visually: do the labels really correspond to what the imagery shows? Overlaying the CLC+ classification on top of the Sentinel-2 RGB tile makes mis-aligned, mis-classified or stale labels obvious in a few seconds of scrolling — much faster than computing summary statistics. An interactive map with toggleable layers lets you flip the labels on and off to check the boundary lines class by class.
CautionExercise 10 — Overlay the satellite image and CLC+ label on an interactive map
Goal: Create an interactive folium map displaying both the Sentinel-2 RGB composite and the CLC+ land-cover label as toggleable overlays. Both rasters live in EPSG:3035 and must be reprojected to WGS84 — pixels and all — before Folium can render them correctly (same reasoning as Exercise 8).
Steps:
- Load the satellite image for
LU000/2021withrasterioand read RGB bands (4, 3, 2) - Load the matching CLC+ label from S3
- Reproject the RGB bands to WGS84 with
Resampling.bilinear(continuous reflectance) and the integer label withResampling.nearest(categorical — bilinear would invent non-existent class IDs) - Normalize the warped RGB, build an alpha channel for the empty corners, and apply a colour lookup table to the warped label
- Reproject the tile bounds with
transform_bounds(), create afolium.Map, and add the twoImageOverlaylayers - Add a
folium.LayerControl()so layers can be toggled on and off
TipHint — Exercise 10
Resampling.bilinearfor the RGB bands;Resampling.nearestfor the label (do not average integer class IDs).- Use the same
dst_transform / dst_w / dst_hfor both rasters so the two layers stay pixel-aligned. - Apply the colour LUT after warping (
color_lut[label_wgs84]), so the LUT maps integer class IDs and the alpha channel of class 0 stays exact. to_rgba("#FF0100", alpha=0.7)returns an RGBA tuple with values in [0, 1].transform_bounds(src_crs, "EPSG:4326", left, bottom, right, top)returns(west, south, east, north)in WGS84.ImageOverlay(image=array, bounds=[[south, west], [north, east]], name="Layer Name")— thenameparameter is what appears inLayerControl.folium.LayerControl().add_to(m)adds a toggle widget to switch layers on and off.
Code template:
import numpy as np
import urllib.request
import io
import rasterio
import folium
from rasterio.transform import from_bounds
from rasterio.warp import (
transform_bounds,
reproject,
Resampling,
calculate_default_transform,
)
from rasterio.crs import CRS
from matplotlib.colors import to_rgba
# --- Given: class colours (same as the colormap above) ---
classes = [
("Sealed (1)", "#FF0100"),
("Woody -- needle leaved trees (2)", "#238B23"),
("Woody -- Broadleaved deciduous trees (3)", "#80FF00"),
("Woody -- Broadleaved evergreen trees (4)", "#00FF00"),
("Low-growing woody plants (bushes, shrubs) (5)", "#804000"),
("Permanent herbaceous (6)", "#CCF24E"),
("Periodically herbaceous (7)", "#FEFF80"),
("Lichens and mosses (8)", "#FF81FF"),
("Non- and sparsely-vegetated (9)", "#BFBFBF"),
("Water (10)", "#0080FF"),
]
# Step 1: Load satellite image (raw bands, no normalization yet)
image_url = (
"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
"project3/data/images/LU000/"
"2021/4017000_2974190_0_402.tif"
)
with rasterio.open(image_url) as src:
rgb_data = src.read([4, 3, 2])
bounds_3035 = src.bounds
crs = src.crs
# Step 2: Load the matching label
label_url = (
"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
"project3/data/labels/LU000/"
"2021/4017000_2974190_0_402.npy"
)
with urllib.request.urlopen(label_url) as response:
label = np.load(io.BytesIO(response.read()))
# Step 3: Reproject both rasters onto a common WGS84 grid
dst_crs = CRS.from_epsg(4326)
h, w = rgb_data.shape[1], rgb_data.shape[2]
src_transform = from_bounds(*bounds_3035, w, h)
dst_transform, dst_w, dst_h = calculate_default_transform(
crs, dst_crs, w, h, *bounds_3035
)
rgb_wgs84_bands = np.zeros((3, dst_h, dst_w), dtype=np.float32)
for i in range(3):
reproject(
source=rgb_data[i].astype(np.float32),
destination=rgb_wgs84_bands[i],
src_transform=src_transform,
src_crs=crs,
dst_transform=dst_transform,
dst_crs=dst_crs,
resampling=___, # TODO: bilinear for continuous reflectance
)
label_wgs84 = np.zeros((dst_h, dst_w), dtype=label.dtype)
reproject(
source=label,
destination=label_wgs84,
src_transform=src_transform,
src_crs=crs,
dst_transform=dst_transform,
dst_crs=dst_crs,
resampling=___, # TODO: nearest for categorical class IDs
)
# Step 4: Build the RGB overlay (normalize + alpha) and the label RGBA (colour LUT)
p98 = np.percentile(rgb_wgs84_bands[rgb_wgs84_bands > 0], 98)
rgb_overlay = np.clip(np.transpose(rgb_wgs84_bands, (1, 2, 0)) / p98, 0, 1)
alpha = (rgb_wgs84_bands.max(axis=0) > 0).astype(np.float32)
rgba_overlay = np.dstack([rgb_overlay, alpha])
color_lut = np.zeros((11, 4), dtype=np.float32)
color_lut[0] = ___ # TODO: [0, 0, 0, 0] (fully transparent for nodata)
for i, (_, hex_color) in enumerate(classes, start=1):
color_lut[i] = ___ # TODO: list(to_rgba(hex_color, alpha=0.7))
label_rgba = ___ # TODO: color_lut[label_wgs84]
# Step 5: Reproject bounds and build the map
west, south, east, north = ___ # TODO: transform_bounds(crs, "EPSG:4326", *bounds_3035)
center_lat = ___ # TODO: (south + north) / 2
center_lon = ___ # TODO: (west + east) / 2
m = ___ # TODO: folium.Map(location=[center_lat, center_lon], zoom_start=15)
___ # TODO: folium.raster_layers.ImageOverlay(image=rgba_overlay, bounds=[[south, west], [north, east]], name="Sentinel-2 RGB").add_to(m)
___ # TODO: folium.raster_layers.ImageOverlay(image=label_rgba, bounds=[[south, west], [north, east]], name="CLC+ Label", opacity=0.8).add_to(m)
# Step 6: Layer control
___ # TODO: folium.LayerControl().add_to(m)
m
TipSolution — Exercise 10
import numpy as np
import urllib.request
import io
import rasterio
import folium
from rasterio.transform import from_bounds
from rasterio.warp import (
transform_bounds,
reproject,
Resampling,
calculate_default_transform,
)
from rasterio.crs import CRS
from matplotlib.colors import to_rgba
classes = [
("Sealed (1)", "#FF0100"),
("Woody -- needle leaved trees (2)", "#238B23"),
("Woody -- Broadleaved deciduous trees (3)", "#80FF00"),
("Woody -- Broadleaved evergreen trees (4)", "#00FF00"),
("Low-growing woody plants (bushes, shrubs) (5)", "#804000"),
("Permanent herbaceous (6)", "#CCF24E"),
("Periodically herbaceous (7)", "#FEFF80"),
("Lichens and mosses (8)", "#FF81FF"),
("Non- and sparsely-vegetated (9)", "#BFBFBF"),
("Water (10)", "#0080FF"),
]
# Step 1: Load satellite image
image_url = (
"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
"project3/data/images/LU000/"
"2021/4017000_2974190_0_402.tif"
)
with rasterio.open(image_url) as src:
rgb_data = src.read([4, 3, 2])
bounds_3035 = src.bounds
crs = src.crs
# Step 2: Load the matching label
label_url = (
"https://minio.lab.sspcloud.fr/projet-funathon/2026/"
"project3/data/labels/LU000/"
"2021/4017000_2974190_0_402.npy"
)
with urllib.request.urlopen(label_url) as response:
label = np.load(io.BytesIO(response.read()))
# Step 3: Reproject both rasters onto a common WGS84 grid.
# RGB → Resampling.bilinear (continuous values); label → Resampling.nearest
# (categorical: averaging integer class IDs would invent classes that don't exist).
dst_crs = CRS.from_epsg(4326)
h, w = rgb_data.shape[1], rgb_data.shape[2]
src_transform = from_bounds(*bounds_3035, w, h)
dst_transform, dst_w, dst_h = calculate_default_transform(
crs, dst_crs, w, h, *bounds_3035
)
rgb_wgs84_bands = np.zeros((3, dst_h, dst_w), dtype=np.float32)
for i in range(3):
reproject(
source=rgb_data[i].astype(np.float32),
destination=rgb_wgs84_bands[i],
src_transform=src_transform,
src_crs=crs,
dst_transform=dst_transform,
dst_crs=dst_crs,
resampling=Resampling.bilinear,
)
label_wgs84 = np.zeros((dst_h, dst_w), dtype=label.dtype)
reproject(
source=label,
destination=label_wgs84,
src_transform=src_transform,
src_crs=crs,
dst_transform=dst_transform,
dst_crs=dst_crs,
resampling=Resampling.nearest,
)
# Step 4: Build RGB overlay (normalize + alpha for empty corners) and label RGBA.
p98 = np.percentile(rgb_wgs84_bands[rgb_wgs84_bands > 0], 98)
rgb_overlay = np.clip(np.transpose(rgb_wgs84_bands, (1, 2, 0)) / p98, 0, 1)
alpha = (rgb_wgs84_bands.max(axis=0) > 0).astype(np.float32)
rgba_overlay = np.dstack([rgb_overlay, alpha])
color_lut = np.zeros((11, 4), dtype=np.float32)
color_lut[0] = [0, 0, 0, 0]
for i, (_, hex_color) in enumerate(classes, start=1):
color_lut[i] = list(to_rgba(hex_color, alpha=0.7))
label_rgba = color_lut[label_wgs84]
# Step 5: Reproject bounds and build the map
west, south, east, north = transform_bounds(crs, "EPSG:4326", *bounds_3035)
center_lat = (south + north) / 2
center_lon = (west + east) / 2
m = folium.Map(location=[center_lat, center_lon], zoom_start=15)
folium.raster_layers.ImageOverlay(
image=rgba_overlay,
bounds=[[south, west], [north, east]],
name="Sentinel-2 RGB",
).add_to(m)
folium.raster_layers.ImageOverlay(
image=label_rgba,
bounds=[[south, west], [north, east]],
name="CLC+ Label",
opacity=0.8,
).add_to(m)
# Step 6: Layer control
folium.LayerControl().add_to(m)
m5 Summary
In this chapter you built the full data pipeline that feeds a land-cover segmentation model:
| Step | What you did | Key tools |
|---|---|---|
| Load & explore imagery | Opened a Sentinel-2 GeoTIFF, read spectral bands, and inspected raster metadata | rasterio |
| Visualise composites | Displayed true-colour and false-colour composites; computed NDVI | numpy, matplotlib |
| Geospatial manipulation | Worked with CRS, built geometries, performed spatial joins, and plotted interactive maps | geopandas, shapely, folium |
| Navigate the tile index | Geocoded a city with Nominatim, resolved its NUTS3 region, and found the covering tile with the filename2bbox.parquet index |
requests, geopandas |
| Load CLC+ labels | Downloaded pre-processed land-cover labels from S3 and paired them pixel-for-pixel with satellite images | numpy, urllib |
| (Optional) Acquire new data | Downloaded CLC+ labels from the Copernicus ImageServer; queried and downloaded Sentinel-2 imagery from the Sentinel Hub and OData APIs | requests, rasterio.io.MemoryFile |
5.1 What’s next?
You now have aligned image / label pairs — the raw material for supervised learning. You can continue with either:
- Model Explanation — walk through the SegFormer architecture used for segmentation.
- Model Training (optional) — train a SegFormer segmentation model on the Sentinel-2 / CLC+ pairs you assembled here.
- Inference — run a pre-trained model on new tiles, to map land cover predictions on newer images.
If you’re curious about where the pre-processed patches come from and how you would build them for a different region, the Appendix walks through the full download pipeline from the original Copernicus APIs.
Appendix — Acquiring data from source APIs
Acquiring CLC+ Labels from APIs
NoteOptional — Click to expand
This section shows how to download CLC+ Backbone labels directly from the Copernicus Land Monitoring Service REST API and prepare them for the training pipeline. It is not needed for the rest of the sections — the pre-processed labels on S3 are sufficient.
5.1.1 Downloading from the Copernicus Land Monitoring Service ImageServer
Labels can be downloaded directly from the Copernicus Land Monitoring Service using the ArcGIS ImageServer exportImage endpoint. No authentication is required. The bounding box must match the satellite tile extent exactly to ensure pixel-level alignment.
import requests
import numpy as np
import rasterio
from rasterio.io import MemoryFile
year = 2021
export_url = (
f"https://copernicus.discomap.eea.europa.eu/arcgis/rest/services/CLC_plus/"
f"CLMS_CLCplus_RASTER_{year}_010m_eu/ImageServer/exportImage"
)
bbox = [3649890, 2331750, 3652390, 2334250]
xmin, ymin, xmax, ymax = bbox
resolution = 10 # 1 pixel = 10 m
size_x = int((xmax - xmin) / resolution)
size_y = int((ymax - ymin) / resolution)
params = {
"f": "image",
"bbox": f"{xmin},{ymin},{xmax},{ymax}",
"bboxSR": "3035",
"imageSR": "3035",
"size": f"{size_x},{size_y}",
"format": "tiff",
}
response = requests.get(export_url, params=params)
response.raise_for_status()
with MemoryFile(response.content) as memfile:
with memfile.open() as src:
label_array = src.read(1) # single band, shape (H, W)
# Map nodata values to 0 (254 = unclassified, 255 = nodata)
label_array[(label_array == 254) | (label_array == 255)] = 0
print(f"Label shape: {label_array.shape}, classes: {np.unique(label_array)}")
CautionExercise 11 (optional) — Download a CLC+ label from the ImageServer API
Goal: Query the Copernicus Land Monitoring Service ImageServer directly to download the CLC+ Backbone label matching a Sentinel-2 patch, and convert it to a NumPy array.
Steps:
- Define the bounding box
[3649890, 2331750, 3652390, 2334250](EPSG:3035) and compute pixel dimensions (1 px = 10 m) - Build the
exportImageURL foryear=2021 - Send a GET request with the required parameters and raise on HTTP errors
- Load the TIFF response in-memory with
MemoryFile(response.content)and read band 1 - Map nodata values 254 and 255 to 0
import requests
import numpy as np
import rasterio
from rasterio.io import MemoryFile
# Step 1: Define bounding box and compute pixel dimensions
year = 2021
bbox = [3649890, 2331750, 3652390, 2334250]
xmin, ymin, xmax, ymax = bbox
resolution = 10 # 1 pixel = 10 m
size_x = ___ # TODO: int((xmax - xmin) / resolution)
size_y = ___ # TODO: int((ymax - ymin) / resolution)
# Step 2: Build the exportImage URL
export_url = ___ # TODO: f"https://copernicus.discomap.eea.europa.eu/arcgis/rest/services/CLC_plus/CLMS_CLCplus_RASTER_{year}_010m_eu/ImageServer/exportImage"
# Step 3: Send the request
params = {
"f": "image",
"bbox": f"{xmin},{ymin},{xmax},{ymax}",
"bboxSR": "3035",
"imageSR": "3035",
"size": f"{size_x},{size_y}",
"format": "tiff",
}
response = ___ # TODO: requests.get(export_url, params=params)
___ # TODO: response.raise_for_status()
# Step 4: Load TIFF from memory and read band 1
with MemoryFile(___) as memfile: # TODO: response.content
with memfile.open() as src:
img_array = ___ # TODO: src.read(1)
# Step 5: Map nodata values to 0
img_array[___] = 0 # TODO: (img_array == 254) | (img_array == 255)
TipHint — Exercise 11
- The ImageServer URL pattern:
https://copernicus.discomap.eea.europa.eu/arcgis/rest/services/CLC_plus/CLMS_CLCplus_RASTER_{year}_010m_eu/ImageServer/exportImage bboxSRandimageSRboth set to"3035"keep the data in EPSG:3035 (metres).sizemust match the bbox extent:size_x = int((xmax - xmin) / 10),size_y = int((ymax - ymin) / 10).MemoryFile(response.content)wraps the raw bytes sorasteriocan open the TIFF without writing to disk.src.read(1)reads band 1 as a 2D NumPy array of shape(H, W).
TipSolution — Exercise 11
import requests
import numpy as np
import rasterio
from rasterio.io import MemoryFile
year = 2021
bbox = [3649890, 2331750, 3652390, 2334250]
xmin, ymin, xmax, ymax = bbox
resolution = 10
size_x = int((xmax - xmin) / resolution)
size_y = int((ymax - ymin) / resolution)
export_url = (
f"https://copernicus.discomap.eea.europa.eu/arcgis/rest/services/CLC_plus/"
f"CLMS_CLCplus_RASTER_{year}_010m_eu/ImageServer/exportImage"
)
params = {
"f": "image",
"bbox": f"{xmin},{ymin},{xmax},{ymax}",
"bboxSR": "3035",
"imageSR": "3035",
"size": f"{size_x},{size_y}",
"format": "tiff",
}
response = requests.get(export_url, params=params)
response.raise_for_status()
with MemoryFile(response.content) as memfile:
with memfile.open() as src:
img_array = src.read(1)
img_array[(img_array == 254) | (img_array == 255)] = 05.1.2 Uploading labels to S3
The training pipeline in section 2 expects labels as NumPy .npy files stored on S3, following a specific path convention:
# Satellite image
s3://projet-funathon/2026/project3/data/images/{NUTS}/{year}/{patch_id}.tif
# Corresponding label
s3://projet-funathon/2026/project3/data/labels/{NUTS}/{year}/{patch_id}.npy
CautionExercise 12 (optional) — Save the label as
.npy and upload to S3
Goal: Save the label array from Exercise 11 as a .npy file and upload it to S3 in the path expected by the training pipeline.
Steps:
- Save
img_arraylocally as a.npyfile usingnp.save() - Initialise an
S3FileSystemwithget_file_system()(fromutils) - Build the S3 destination path matching the training pipeline convention
- Upload the local file with
fs.put() - Verify the upload by listing the S3 directory with
fs.ls()
import numpy as np
from src.utils import get_file_system
# Step 1: Save the label array locally as .npy
local_path = "3649890_2331750_0_937.npy"
___ # TODO: np.save(local_path, img_array)
# Step 2: Initialise the S3 filesystem
fs = ___ # TODO: get_file_system()
# Step 3: Build the S3 destination path
s3_path = ___ # TODO: "projet-funathon/2026/project3/data/images/LU000/2024/250/3649890_2331750_0_937.npy"
# Step 4: Upload to S3
___ # TODO: fs.put(local_path, s3_path)
# Step 5: Verify the upload
print(fs.ls(___)) # TODO: S3 directory path (without filename)
TipHint — Exercise 12
np.save("file.npy", array)saves a NumPy array to disk.get_file_system()returns ans3fs.S3FileSystemconfigured with the SSP Cloud credentials.- The S3 path must not include the
s3://prefix when usingfs.put()andfs.ls(). fs.put(local_path, s3_path)uploads a local file to S3.fs.ls("rojet-funathon/2026/project3/data/labels/LU000/2021")lists all files in the directory.
TipSolution — Exercise 12
import numpy as np
from src.utils import get_file_system
local_path = "3649890_2331750_0_937.npy"
np.save(local_path, img_array)
fs = get_file_system()
s3_path = (
"projet-funathon/2026/project3/data/labels/LU000/2021/3649890_2331750_0_937.npy"
)
fs.put(local_path, s3_path)
print(fs.ls("projet-funathon/2026/project3/data/labels/LU000/2021"))Acquiring Sentinel-2 Data from APIs
NoteOptional — Click to expand
This section is for users who want to query the Copernicus Data Space Ecosystem directly. It requires a free CDSE account and is not needed for the rest of the tutorial.
There are several ways to acquire Sentinel-2 data programmatically:
| Approach | What you get | Best for |
|---|---|---|
| Sentinel Hub API | Custom-processed imagery (band selection, format, resolution) | On-the-fly analysis, small areas |
| OData API | Full Sentinel-2 products (ZIP archives) | Bulk downloads, complete products |
| Pre-processed S3 (this tutorial) | Ready-to-use GeoTIFF patches | Training ML models |
The official programmatic access point is the Sentinel Hub API, part of the Copernicus Data Space Ecosystem (CDSE). It provides two main endpoints:
- Catalog API — search for available Sentinel-2 products by area, date, and cloud cover
- Processing API — download imagery on-the-fly with custom band combinations and formats
To use the Sentinel Hub API you need a free CDSE account — register at https://dataspace.copernicus.eu/. Then, register an OAuth client in the CDSE dashboard to obtain a Client ID and Client Secret.
5.1.2.1 Authentication
Sentinel Hub uses OAuth2 client credentials. Authenticate with oauthlib and requests_oauthlib:
from oauthlib.oauth2 import BackendApplicationClient
from requests_oauthlib import OAuth2Session
client_id = "your-client-id"
client_secret = "your-client-secret"
client = BackendApplicationClient(client_id=client_id)
oauth = OAuth2Session(client=client)
token = oauth.fetch_token(
token_url="https://identity.dataspace.copernicus.eu/auth/realms/CDSE/protocol/openid-connect/token",
client_secret=client_secret,
include_client_id=True,
)5.1.2.2 Searching the catalogue
Use the Catalog API to find Sentinel-2 L2A products for a given area and date range:
catalog_url = "https://sh.dataspace.copernicus.eu/api/v1/catalog/1.0.0/search"
search_body = {
"collections": ["sentinel-2-l2a"],
"datetime": "2021-06-01T00:00:00Z/2021-06-30T23:59:59Z",
"bbox": [23.0, 42.0, 24.0, 43.0], # [west, south, east, north] in WGS84
"limit": 10,
"filter": "eo:cloud_cover < 20",
"filter-lang": "cql2-text",
}
response = oauth.post(catalog_url, json=search_body)
results = response.json()
print(f"Found {len(results['features'])} products")5.1.2.3 Downloading imagery
Use the Processing API to download a true-colour Sentinel-2 image as a GeoTIFF:
process_url = "https://sh.dataspace.copernicus.eu/api/v1/process"
evalscript = """
//VERSION=3
function setup() {
return { input: ["B04", "B03", "B02"], output: { bands: 3, sampleType: "AUTO" } };
}
function evaluatePixel(sample) {
return [sample.B04, sample.B03, sample.B02];
}
"""
request_body = {
"input": {
"bounds": {
"bbox": [23.0, 42.0, 24.0, 43.0],
"properties": {"crs": "http://www.opengis.net/def/crs/EPSG/0/4326"},
},
"data": [
{
"type": "sentinel-2-l2a",
"dataFilter": {
"timeRange": {
"from": "2021-06-01T00:00:00Z",
"to": "2021-06-30T23:59:59Z",
},
"maxCloudCoverage": 20,
},
}
],
},
"output": {
"width": 512,
"height": 512,
"responses": [{"identifier": "default", "format": {"type": "image/tiff"}}],
},
"evalscript": evalscript,
}
response = oauth.post(process_url, json=request_body)
with open("output.tif", "wb") as f:
f.write(response.content)collections: use"sentinel-2-l2a"for Level-2A products (surface reflectance, atmospherically corrected).bbox: bounding box as[west, south, east, north]in WGS84 (EPSG:4326).filter: CQL2 expression for metadata filtering, e.g."eo:cloud_cover < 20"keeps only scenes with under 20 % cloud cover.
CautionExercise 13 (optional) — Geocode a city and download a Sentinel-2 image
Goal: Geocode a city of your choice using the Nominatim API, build a bounding box around it, and use the Sentinel Hub Processing API to download and display a true-colour Sentinel-2 image centred on that city.
Steps:
- Geocode your city with the Nominatim API (as in Exercise 4) — extract
(lon, lat) - Build a small bounding box around the city centre:
[lon - delta, lat - delta, lon + delta, lat + delta]withdelta = 0.05 - Authenticate with OAuth2 using
OAuth2Session+BackendApplicationClientagainst the CDSE token endpoint - Build a Processing API request with the bbox, a summer 2024 date range,
maxCloudCoverage, and the true-colour evalscript - POST to the Processing API, load the response bytes as a TIFF with
MemoryFile, and display the RGB composite
import requests
import numpy as np
import matplotlib.pyplot as plt
import rasterio
from rasterio.io import MemoryFile
from oauthlib.oauth2 import BackendApplicationClient
from requests_oauthlib import OAuth2Session
# Step 1: Geocode the city
city_name = ___ # TODO: e.g. "Paris, France"
geo_response = requests.get(
"https://nominatim.openstreetmap.org/search",
params={"q": city_name, "format": "json", "limit": 1},
headers={"User-Agent": "funathon-project3"},
)
result = geo_response.json()[0]
lon, lat = ___, ___ # TODO: float(result["lon"]), float(result["lat"])
print(f"{city_name}: lon={lon:.4f}, lat={lat:.4f}")
# Step 2: Build a bounding box around the city (±delta degrees)
delta = 0.05
bbox = ___ # TODO: [lon - delta, lat - delta, lon + delta, lat + delta]
# Step 3: Authenticate with OAuth2
client_id = ___ # TODO: your CDSE OAuth client ID
client_secret = ___ # TODO: your CDSE OAuth client secret
client = BackendApplicationClient(client_id=client_id)
oauth = OAuth2Session(client=client)
oauth.fetch_token(
token_url=___, # TODO: "https://identity.dataspace.copernicus.eu/auth/realms/CDSE/protocol/openid-connect/token"
client_secret=client_secret,
include_client_id=True,
)
# Step 4: Build the Processing API request
process_url = "https://sh.dataspace.copernicus.eu/api/v1/process"
evalscript = """
//VERSION=3
function setup() {
return { input: ["B04", "B03", "B02"], output: { bands: 3, sampleType: "AUTO" } };
}
function evaluatePixel(sample) {
return [sample.B04, sample.B03, sample.B02];
}
"""
request_body = {
"input": {
"bounds": {
"bbox": bbox,
"properties": {"crs": "http://www.opengis.net/def/crs/EPSG/0/4326"},
},
"data": [{
"type": "sentinel-2-l2a",
"dataFilter": {
"timeRange": {
"from": ___, # TODO: "2024-06-01T00:00:00Z"
"to": ___, # TODO: "2024-08-31T23:59:59Z"
},
"maxCloudCoverage": ___, # TODO: 20
},
}],
},
"output": {
"width": 512,
"height": 512,
"responses": [{"identifier": "default", "format": {"type": "image/tiff"}}],
},
"evalscript": evalscript,
}
# Step 5: POST, load TIFF from memory, and display
response = ___ # TODO: oauth.post(process_url, json=request_body)
response.raise_for_status()
with MemoryFile(response.content) as memfile:
with memfile.open() as src:
rgb_data = ___ # TODO: src.read([1, 2, 3])
rgb = np.transpose(rgb_data, (1, 2, 0)).astype(np.float32)
rgb = np.clip(rgb / np.percentile(rgb, 98), 0, 1)
fig, ax = plt.subplots(figsize=(6, 6))
ax.imshow(rgb)
ax.set_title(f"Sentinel-2 true colour — {city_name}")
ax.axis("off")
plt.tight_layout()
plt.show()
TipHint — Exercise 13
- Nominatim: same call as Exercise 4 —
params={"q": city_name, "format": "json", "limit": 1}with aUser-Agentheader. - Bbox:
[lon - delta, lat - delta, lon + delta, lat + delta]withdelta = 0.05gives a ~11 km × 11 km area (at mid-latitudes). - CDSE token URL:
"https://identity.dataspace.copernicus.eu/auth/realms/CDSE/protocol/openid-connect/token". maxCloudCoverageis an integer (e.g.20for 20 %).MemoryFile(response.content)wraps the raw TIFF bytes sorasteriocan open them without writing to disk.- Bands 1, 2, 3 in the output correspond to B04, B03, B02 as declared in the evalscript — normalize the same way as in Exercise 1.
TipSolution — Exercise 13
import requests
import numpy as np
import matplotlib.pyplot as plt
import rasterio
from rasterio.io import MemoryFile
from oauthlib.oauth2 import BackendApplicationClient
from requests_oauthlib import OAuth2Session
# Step 1: Geocode the city
city_name = "Paris, France"
geo_response = requests.get(
"https://nominatim.openstreetmap.org/search",
params={"q": city_name, "format": "json", "limit": 1},
headers={"User-Agent": "funathon-project3"},
)
result = geo_response.json()[0]
lon, lat = float(result["lon"]), float(result["lat"])
print(f"{city_name}: lon={lon:.4f}, lat={lat:.4f}")
# Step 2: Build bounding box
delta = 0.05
bbox = [lon - delta, lat - delta, lon + delta, lat + delta]
# Step 3: Authenticate
client_id = "your-client-id"
client_secret = "your-client-secret"
client = BackendApplicationClient(client_id=client_id)
oauth = OAuth2Session(client=client)
oauth.fetch_token(
token_url="https://identity.dataspace.copernicus.eu/auth/realms/CDSE/protocol/openid-connect/token",
client_secret=client_secret,
include_client_id=True,
)
# Step 4: Processing API request
process_url = "https://sh.dataspace.copernicus.eu/api/v1/process"
evalscript = """
//VERSION=3
function setup() {
return { input: ["B04", "B03", "B02"], output: { bands: 3, sampleType: "AUTO" } };
}
function evaluatePixel(sample) {
return [sample.B04, sample.B03, sample.B02];
}
"""
request_body = {
"input": {
"bounds": {
"bbox": bbox,
"properties": {"crs": "http://www.opengis.net/def/crs/EPSG/0/4326"},
},
"data": [
{
"type": "sentinel-2-l2a",
"dataFilter": {
"timeRange": {
"from": "2024-06-01T00:00:00Z",
"to": "2024-08-31T23:59:59Z",
},
"maxCloudCoverage": 20,
},
}
],
},
"output": {
"width": 512,
"height": 512,
"responses": [{"identifier": "default", "format": {"type": "image/tiff"}}],
},
"evalscript": evalscript,
}
# Step 5: Download and display
response = oauth.post(process_url, json=request_body)
response.raise_for_status()
with MemoryFile(response.content) as memfile:
with memfile.open() as src:
rgb_data = src.read([1, 2, 3])
rgb = np.transpose(rgb_data, (1, 2, 0)).astype(np.float32)
rgb = np.clip(rgb / np.percentile(rgb, 98), 0, 1)
fig, ax = plt.subplots(figsize=(6, 6))
ax.imshow(rgb)
ax.set_title(f"Sentinel-2 true colour — {city_name}")
ax.axis("off")
plt.tight_layout()
plt.show()Once you have downloaded a tile, you can upload it to S3 to share it with your team. The SSP Cloud provides an S3-compatible object store accessible via s3fs. Here is how to initialise an S3FileSystem and upload a file:
from src.utils import get_file_system
fs = get_file_system()
# Upload a local file to S3
fs.put("./output.tif", "s3://my-bucket/sentinel2/output.tif")
CautionExercise 14 (optional) — Save the downloaded tile to disk and upload to S3
Goal: Save the Sentinel-2 TIFF bytes from Exercise 13 to a local file and upload it to your personal S3 bucket so it can be shared with your team.
Steps:
- Save
response.contentto a local.tiffile using binary write - Initialise an
S3FileSystemwithget_file_system()(fromutils) - Build an S3 destination path for the file
- Upload with
fs.put()and verify withfs.ls()
from src.utils import get_file_system
# Step 1: Save the TIFF bytes from Exercise 13 to disk
local_path = ___ # TODO: e.g. "paris_rgb.tif"
with open(local_path, "wb") as f:
f.write(___) # TODO: response.content
# Step 2: Initialise the S3 filesystem
fs = ___ # TODO: get_file_system()
# Step 3: Build the S3 destination path
s3_path = ___ # TODO: e.g. "my-bucket/sentinel2/paris_rgb.tif"
# Step 4: Upload and verify
___ # TODO: fs.put(local_path, s3_path)
print(fs.ls(___)) # TODO: S3 directory (without filename)
TipHint — Exercise 14
response.contentfrom Exercise 13 holds the raw TIFF bytes — open the file in binary mode ("wb").get_file_system()returns ans3fs.S3FileSystemconfigured with the SSP Cloud credentials from environment variables.- The S3 path must not include the
s3://prefix when usingfs.put()andfs.ls(). fs.ls("my-bucket/sentinel2")lists all files in that S3 directory.
TipSolution — Exercise 14
from src.utils import get_file_system
local_path = "paris_rgb.tif"
with open(local_path, "wb") as f:
f.write(response.content)
fs = get_file_system()
s3_path = "my-bucket/sentinel2/paris_rgb.tif"
fs.put(local_path, s3_path)
print(fs.ls("my-bucket/sentinel2"))5.1.2.4 Mass download via OData API
The OData API is an alternative interface to the CDSE catalogue that follows the OData v4 standard. While the Sentinel Hub API is designed for custom processing (selecting bands, reprojecting, resampling on-the-fly), the OData API gives you access to complete Sentinel-2 products as ZIP archives — the same files you would download from the CDSE browser.
This is useful when you need:
- The full product with all bands and metadata (e.g., for your own preprocessing pipeline)
- To download many products in bulk
- Product-level metadata (orbit number, processing baseline, tile grid, etc.)
5.1.2.4.1 Querying the catalogue
The OData catalogue endpoint is:
https://catalogue.dataspace.copernicus.eu/odata/v1/ProductsYou query it with URL parameters. The $filter parameter uses OData filter syntax to select products by collection, date, geometry, and attributes:
import requests
odata_url = "https://catalogue.dataspace.copernicus.eu/odata/v1/Products"
# Build the filter string
filter_parts = [
"Collection/Name eq 'SENTINEL-2'",
"Attributes/OData.CSC.StringAttribute/any(att:att/Name eq 'productType' and att/OData.CSC.StringAttribute/Value eq 'S2MSI2A')",
"ContentDate/Start gt 2021-06-01T00:00:00.000Z",
"ContentDate/Start lt 2021-08-31T23:59:59.999Z",
"Attributes/OData.CSC.DoubleAttribute/any(att:att/Name eq 'cloudCover' and att/OData.CSC.DoubleAttribute/Value lt 15.00)",
"OData.CSC.Intersects(area=geography'SRID=4326;POINT(6.1296 49.6341)')", # Luxembourg (Eurostat)
]
params = {
"$filter": " and ".join(filter_parts),
"$top": 5,
"$orderby": "ContentDate/Start desc",
}
response = requests.get(odata_url, params=params)
products = response.json()["value"]
for p in products:
print(f"{p['Name']} — {p['ContentDate']['Start'][:10]} — {p['Id']}")Key $filter elements:
| Syntax | Meaning |
|---|---|
Collection/Name eq 'SENTINEL-2' |
Sentinel-2 collection |
productType ... 'S2MSI2A' |
Level-2A (atmospherically corrected) |
ContentDate/Start gt ... |
Acquisition after a given date |
cloudCover ... lt 15.00 |
Cloud cover below 15 % |
OData.CSC.Intersects(area=geography'SRID=4326;POINT(lon lat)') |
Spatial filter (WKT geometry) |
You can also use $orderby to sort results and $top to limit the number returned.
5.1.2.4.2 Downloading a product
To download a product, you need an access token obtained via the CDSE identity endpoint (different from the Sentinel Hub OAuth client). Use grant_type=password with your CDSE account credentials:
import requests
# Step 1: Get an access token
token_url = "https://identity.dataspace.copernicus.eu/auth/realms/CDSE/protocol/openid-connect/token"
token_response = requests.post(
token_url,
data={
"grant_type": "password",
"username": "your-cdse-email@example.com",
"password": "your-cdse-password",
"client_id": "cdse-public",
},
)
access_token = token_response.json()["access_token"]
# Step 2: Download the product ZIP
product_id = products[0]["Id"] # UUID from the catalogue query
download_url = f"https://zipper.dataspace.copernicus.eu/odata/v1/Products({product_id})/$value"
headers = {"Authorization": f"Bearer {access_token}"}
response = requests.get(download_url, headers=headers, stream=True)
with open("product.zip", "wb") as f:
for chunk in response.iter_content(chunk_size=8192):
f.write(chunk)
print(f"Downloaded {products[0]['Name']}")
Tip
Learn more: OData API docs · CDSE Sentinel-2 product types · Sentinel Hub docs
CautionExercise 15 (optional) — Search and download a Sentinel-2 product via OData
Goal: Use the OData API to search for Sentinel-2 L2A products over a city of your choice during summer 2021 with less than 15 % cloud cover, then download the first result.
Steps:
- Build an OData
$filterstring that selects Sentinel-2 L2A products, summer 2021, cloud cover < 15 %, intersecting your chosen city - Query the OData catalogue with
requests.get() - Authenticate with the CDSE identity endpoint (
grant_type=password,client_id=cdse-public) - Download the first product from
zipper.dataspace.copernicus.eu
import requests
# Step 1: Build the OData filter
odata_url = "https://catalogue.dataspace.copernicus.eu/odata/v1/Products"
filter_parts = [
"Collection/Name eq 'SENTINEL-2'",
"Attributes/OData.CSC.StringAttribute/any(att:att/Name eq 'productType' and att/OData.CSC.StringAttribute/Value eq 'S2MSI2A')",
___, # TODO: ContentDate/Start gt 2021-06-01T00:00:00.000Z
___, # TODO: ContentDate/Start lt 2021-08-31T23:59:59.999Z
___, # TODO: cloudCover lt 15.00
___, # TODO: OData.CSC.Intersects with your city's coordinates
]
params = {
"$filter": " and ".join(filter_parts),
"$top": 5,
"$orderby": "ContentDate/Start desc",
}
# Step 2: Query the catalogue
response = ___ # TODO: requests.get(odata_url, params=params)
products = response.json()["value"]
print(f"Found {len(products)} products")
for p in products:
print(f" {p['Name']} — {p['ContentDate']['Start'][:10]}")
# Step 3: Authenticate for download
token_url = "https://identity.dataspace.copernicus.eu/auth/realms/CDSE/protocol/openid-connect/token"
token_response = requests.post(
token_url,
data={
"grant_type": ___, # TODO: "password"
"username": ___, # TODO: your CDSE email
"password": ___, # TODO: your CDSE password
"client_id": ___, # TODO: "cdse-public"
},
)
access_token = token_response.json()[___] # TODO: "access_token"
# Step 4: Download the first product
product_id = products[0][___] # TODO: "Id"
download_url = f"https://zipper.dataspace.copernicus.eu/odata/v1/Products({product_id})/$value"
headers = {"Authorization": f"Bearer {___}"} # TODO: access_token
response = requests.get(download_url, headers=headers, stream=True)
with open("product.zip", "wb") as f:
for chunk in response.iter_content(chunk_size=8192):
f.write(chunk)
print(f"Downloaded {products[0]['Name']}")
TipHint — Exercise 15
- Use the same
$filtersyntax as shown in the OData section above. - For the spatial filter, find your city’s coordinates (lon, lat) and use:
OData.CSC.Intersects(area=geography'SRID=4326;POINT(lon lat)')— note the space between lon and lat, not a comma. - Date filters:
ContentDate/Start gt 2021-06-01T00:00:00.000ZandContentDate/Start lt 2021-08-31T23:59:59.999Z. - Cloud cover:
Attributes/OData.CSC.DoubleAttribute/any(att:att/Name eq 'cloudCover' and att/OData.CSC.DoubleAttribute/Value lt 15.00). - For authentication, use
grant_type=passwordandclient_id=cdse-public(no client secret needed). - The product UUID is in
products[0]["Id"].
TipSolution — Exercise 15
import requests
# Step 1: Build the OData filter (example: Luxembourg)
odata_url = "https://catalogue.dataspace.copernicus.eu/odata/v1/Products"
filter_parts = [
"Collection/Name eq 'SENTINEL-2'",
"Attributes/OData.CSC.StringAttribute/any(att:att/Name eq 'productType' and att/OData.CSC.StringAttribute/Value eq 'S2MSI2A')",
"ContentDate/Start gt 2021-06-01T00:00:00.000Z",
"ContentDate/Start lt 2021-08-31T23:59:59.999Z",
"Attributes/OData.CSC.DoubleAttribute/any(att:att/Name eq 'cloudCover' and att/OData.CSC.DoubleAttribute/Value lt 15.00)",
"OData.CSC.Intersects(area=geography'SRID=4326;POINT(6.1296 49.6341)')", # Luxembourg (Eurostat)
]
params = {
"$filter": " and ".join(filter_parts),
"$top": 5,
"$orderby": "ContentDate/Start desc",
}
# Step 2: Query the catalogue
response = requests.get(odata_url, params=params)
products = response.json()["value"]
print(f"Found {len(products)} products")
for p in products:
print(f" {p['Name']} — {p['ContentDate']['Start'][:10]}")
# Step 3: Authenticate for download
token_url = "https://identity.dataspace.copernicus.eu/auth/realms/CDSE/protocol/openid-connect/token"
token_response = requests.post(
token_url,
data={
"grant_type": "password",
"username": "your-cdse-email@example.com",
"password": "your-cdse-password",
"client_id": "cdse-public",
},
)
access_token = token_response.json()["access_token"]
# Step 4: Download the first product
product_id = products[0]["Id"]
download_url = f"https://zipper.dataspace.copernicus.eu/odata/v1/Products({product_id})/$value"
headers = {"Authorization": f"Bearer {access_token}"}
response = requests.get(download_url, headers=headers, stream=True)
with open("product.zip", "wb") as f:
for chunk in response.iter_content(chunk_size=8192):
f.write(chunk)
print(f"Downloaded {products[0]['Name']}")Downloading an Entire NUTS Region
NoteOptional - Click to expand
The exercises above worked with individual tiles — one image, one label at a time. Building a production-ready training dataset means repeating this process for every tile that covers a NUTS3 region: hundreds of image/label pairs, aligned pixel-for-pixel.
Starting from scratch, the script must:
- Define the tile grid — load the NUTS3 boundary from the Eurostat GISCO API and overlay a regular 2 500 m × 2 500 m grid (250 px at 10 m resolution), keeping only patches that intersect the region boundary.
- Discover products — use the OData catalogue API to find the Sentinel-2 L2A product tiles (roughly 100 km × 100 km each) that cover the region.
- Stream band data from EO S3 — the CDSE EO S3 bucket (
eodata.dataspace.copernicus.eu) stores the raw.SAFEarchives. Individual JP2 band files can be window-read via GDAL’s/vsis3/virtual filesystem: only the bytes covering each patch are transferred, with automatic resampling across the 10 m / 20 m / 60 m band resolutions. - Download labels — for each patch, query the CLC+ ImageServer as shown in the exercises above.
- Upload to personal S3 — store images as 14-channel float64 GeoTIFFs (12 L2A surface-reflectance bands without B10, plus NDVI and NDWI as derived layers) and labels as
.npyfiles, then write afilename2bbox.parquetindex matching the format used in this tutorial.
NoteSomething to think about — before looking at the solution
These questions focus on architectural decisions you’d have to make if you were writing the script yourself. As you read the reference solution afterwards, you can match each answer to the function that implements it.
- Which API for product discovery? CDSE exposes several catalogue APIs — STAC, OpenSearch, Sentinel Hub OGC, and OData. They return the same underlying products but with different query languages, result shapes, and server-side filtering capabilities. Which one is right for a scripted batch download, and why?
- Coarse-grained vs. fine-grained downloads. Should the script fetch each 2 500 m patch independently, or download a whole 100 km × 100 km Sentinel-2 product once and cut the patches out of it? Think about request count, total bytes transferred, and code complexity.
- Avoiding unnecessary bytes. Each JP2 band file weighs 50–100 MB. How do you extract only the 250×250 px window that belongs to a patch, without paying the full download cost — or at least without paying it more than once per product?
- Two S3 back-ends in the same script. The source (CDSE EO S3,
eodata.dataspace.copernicus.eu) and the destination (your personal SSP Cloud bucket) are different S3 services with different endpoints, different access keys, and very different latencies. How do you keep their credentials and connections from interfering with each other? - Writing a multi-band GeoTIFF in memory. Once you’ve extracted 13 resampled band arrays for a patch, how do you package them as a single georeferenced GeoTIFF that you can upload in one
put_objectrequest, without touching the local filesystem? - Reconstructing
filename2bbox.parquetand resumability. How is the tile index written, and what’s the mechanism that lets the script be interrupted after 300 of 600 tiles and resume exactly where it left off on the next run — without re-downloading anything?
TipAnswers
Which API for product discovery? →
find_s2_products(). The script uses the OData catalogue API because it supports rich server-side filtering through a single$filterexpression (product type, geographic intersection, cloud cover, date range, online status) and returns the exact metadata the script needs — including each product’sGeoFootprintand its canonicalS3Path. STAC is excellent for generic catalogue browsing but doesn’t expose the embedded attribute filters (likecloudCover) as first-class query parameters. Sentinel Hub’s Processing API is image-oriented (returns rendered tiles) rather than metadata-oriented. For a batch script that needs to discover products first and then decide what to read, OData is the cleanest fit.Coarse-grained vs. fine-grained downloads. → product-first loop in
main(),open_band_readers(). Downloading per product is dramatically more efficient. A single product’s 13 JP2 bands are shared by hundreds of 2.5 km patches within that product’s 100 km footprint. The script therefore downloads each product’s bands exactly once, holds them open in memory, and loops over all covered patches before moving on. Fine-grained per-patch downloads would multiply request count and total bytes by orders of magnitude.Avoiding unnecessary bytes. →
open_band_readers()+read_patch(). The script useseo_fs.cat(s3_path)to pull each JP2 into arasterio.MemoryFileonce per product. After that, every patch is a cheaprasteriowindow read against the already-open in-memory reader — no further network I/O. (GDAL’s/vsis3/virtual filesystem would also support partial range reads straight from S3, but eagerly downloading the JP2 wins whenever a product covers many patches, which is the common case here.) The resulting per-patch read is ~250 px × 250 px × 13 bands ≈ a few hundred KB of uncompressed raster out of ~700 MB of source data per product.Two S3 back-ends in the same script. →
build_eo_fs()andbuild_personal_fs(). The script creates two independents3fs.S3FileSysteminstances, one per endpoint, each with its own credentials. Because JP2 bytes are materialised into aMemoryFilebefore rasterio opens them, rasterio never has to resolve a network URL and never mixes the two credential sets. The destination bucket is accessed only through its own file system forexists()/open("wb")calls.Writing a multi-band GeoTIFF in memory. →
patch_array_to_tiff_bytes(). The script relies on rasterio’sMemoryFile: it opens an emptyMemoryFile(), callsmemfile.open(**profile)to create a GeoTIFF dataset (specifying driver, dtype, width, height, band count, CRS = EPSG:3035, affine transform derived from the patch bbox, deflate compression), writes the(13, H, W)array, closes the inner dataset to flush the data to GDAL’s/vsimem/buffer, and finally callsmemfile.read()to pull the encoded bytes back out. Those bytes go straight into the upload call — no temp file on disk.Reconstructing
filename2bbox.parquetand resumability. → tile-existence check inmain()+tiles[['filename','bbox']].to_parquet(...)at the end. The filename + bbox of every candidate patch is known up front from the NUTS3-grid construction (build_tile_grid); the parquet index is just that DataFrame written to personal S3 after processing. For resumability, before any work on a patch the script callspersonal_fs.exists(...)on both the image.tifand the label.npy; if both are present it skips. This treats file-present as “done”, so the trade-off is that if a previous run produced corrupt tiles (e.g. before the CRS fix inread_patch), you must delete those keys explicitly before re-running.
The complete solution is provided in final_solution/download_region.py — a self-contained uv script that requires no virtual environment setup. EO S3 credentials are separate from your CDSE API credentials and are generated at https://eodata-s3keysmanager.dataspace.copernicus.eu/.
uv run src/download_region.py \
--nuts FR101 \
--year 2021 \
--s3-bucket my-bucket \
--eo-s3-key <EO_S3_ACCESS_KEY_ID> \
--eo-s3-secret <EO_S3_SECRET_ACCESS_KEY>Required environment variables for personal S3: AWS_S3_ENDPOINT, AWS_ACCESS_KEY_ID, AWS_SECRET_ACCESS_KEY.